I have seen this several times before on larger copters, never learned why.
this one is about 22kg. (empty)
https://drive.google.com/file/d/1-gAfXT41gRgnsR2C-n8sJ-7FTywPJYYN/view?usp=sharing
I haven’t look at the log but the most common reason is that one of the sticks is not quite in the center. It can be any of them though, roll, pitch, yaw or throttle…
@rmackay9 Yes, that would be my answer to anyone who is asking too 
Feel tree to take a look, it is not that simple,
It does output AutoTune statustext at regular intervals, except there are no "“TWITCHING” or “Twitch” text ,(nor does it twitch) unless provoked.
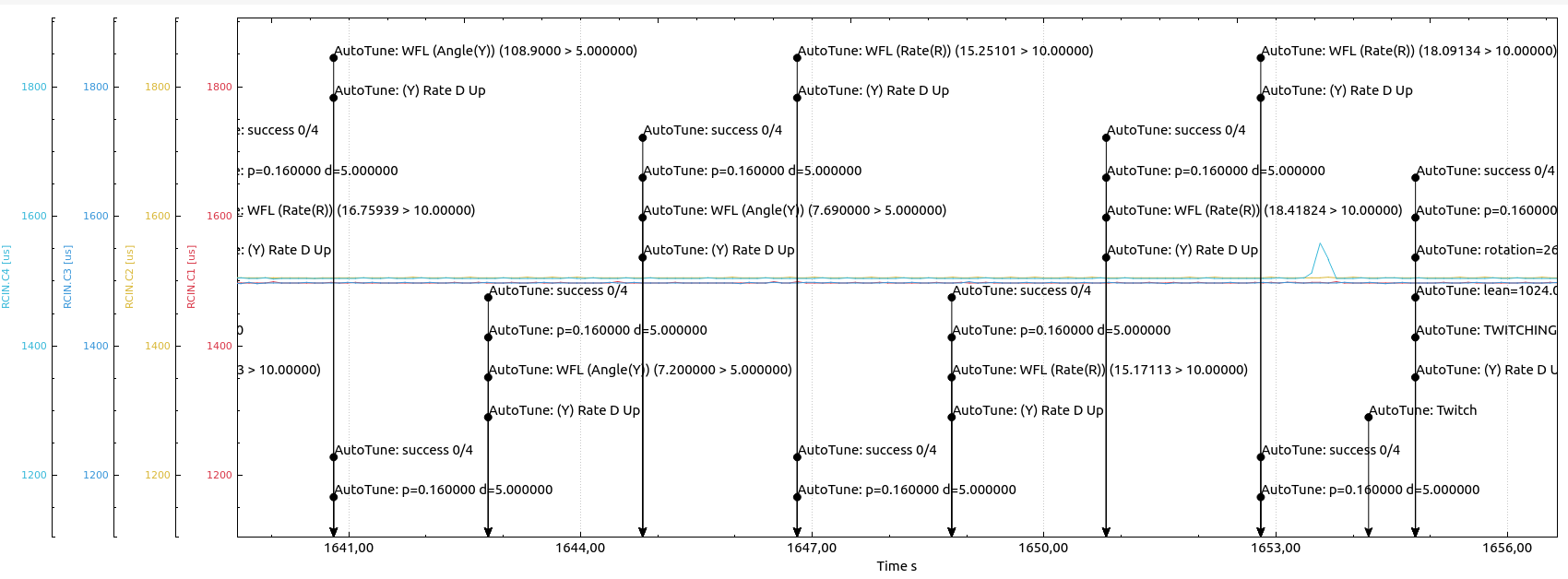
I also don’t think this is working quite as designed:
Success 3/4 … Reached limit … success 0/4 : does it fall back ? is it expected to ?
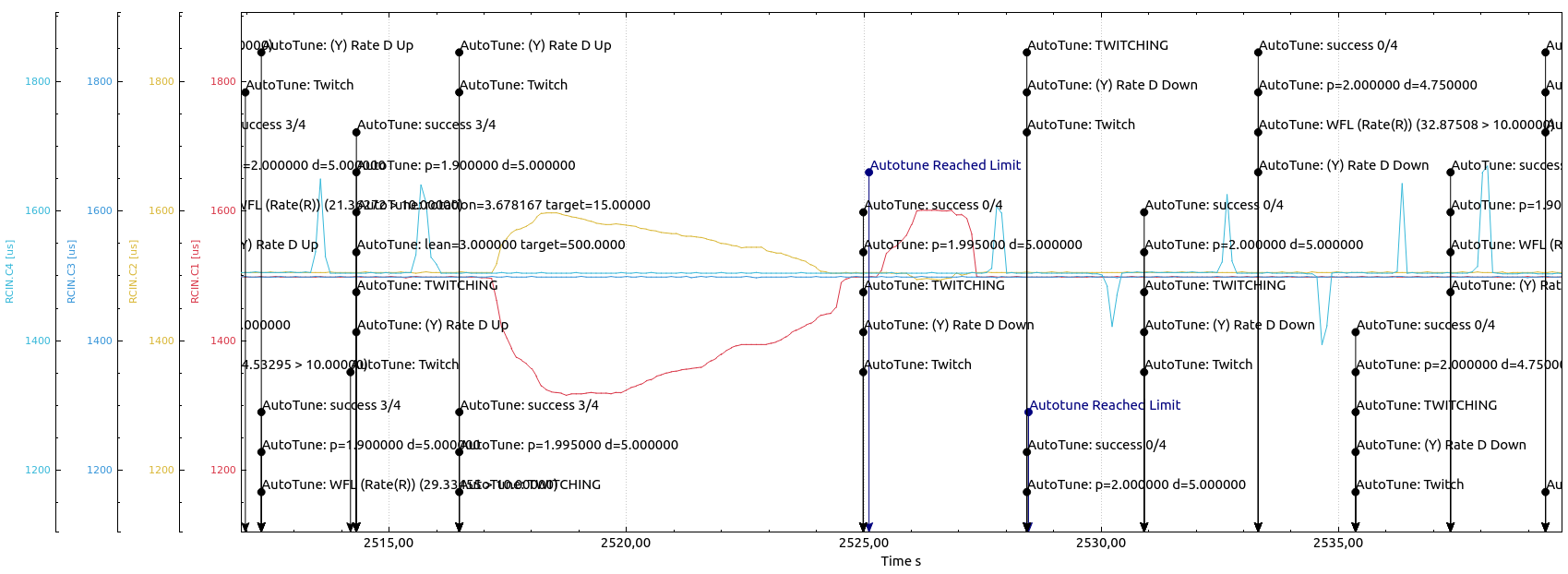
it seems to be stuck at changing ATUN.RP back and forth.
I think we lost the warning I added for when pilot overrides are active.
https://github.com/ArduPilot/ardupilot/pull/10833 <- that adds them back
@peterbarker are you saying you can see a reason for it NOT to twitch ?
I do not think seeing your warning would have helped me understand why it fail.
I could share my personal experience:
I was doing a lot of autotune on our small quadcopter, initially it was constantly like nothing, never starting the first twiching, but after any rc action, after it, it always makes the first twich, but not a second one.
So after some headache and master @Leonardthall support, I’ve found out it was too much background noise (IMU bad filtering, bad sampling frequency, …) making the IMU data too noise to be able to trigger the autotune twich logic!
Only this, change imu dampering+imu acc and imu gyro frequnecy solve the issue.
That’s it, is simple to verify based on the above.
Good luck
@Giorgio_Rinolfi
By any chance, do you remember what was changed ?
- or, if you post your .param, I may diff the param file for changes.
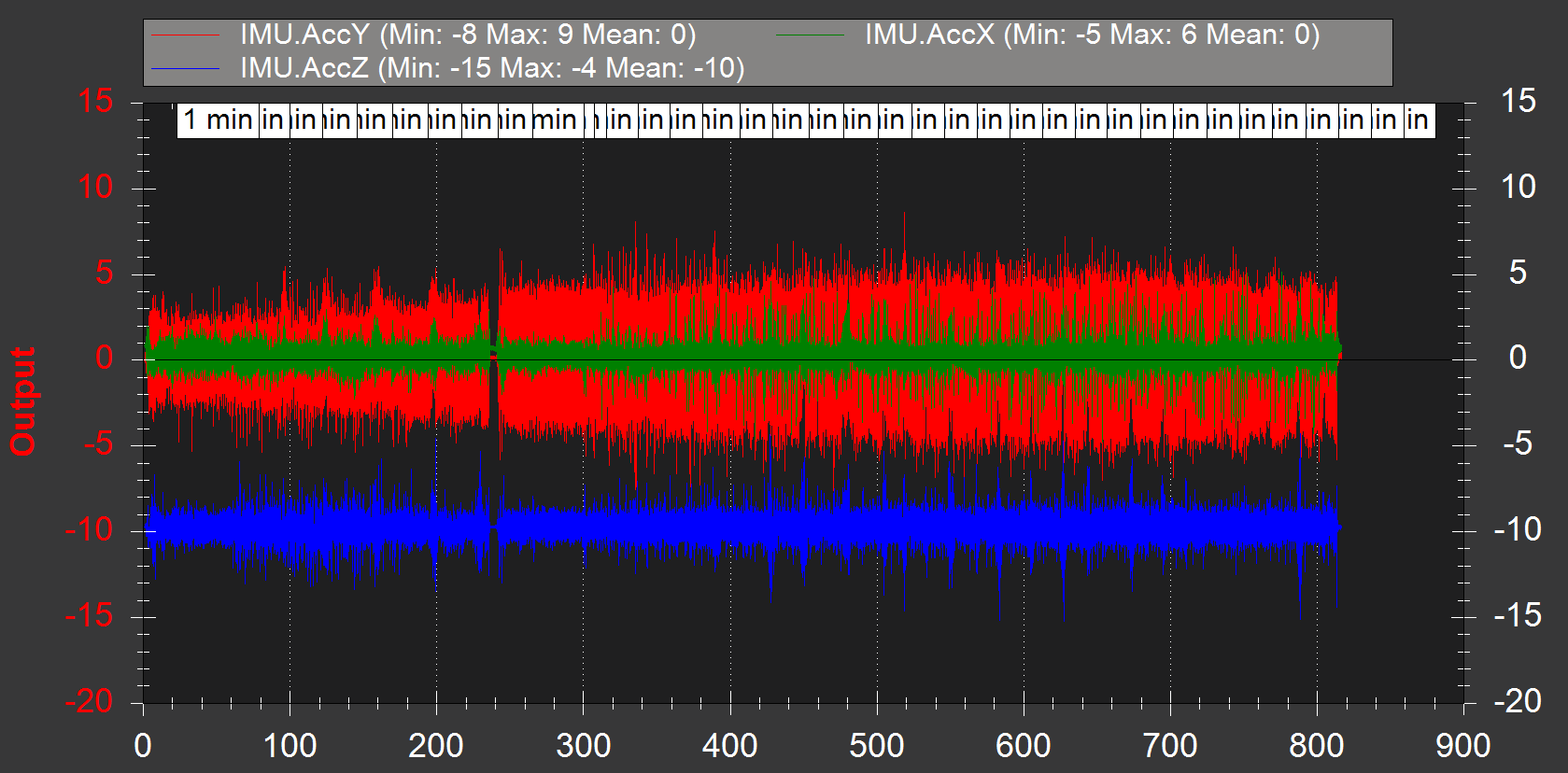
I also think its the vibration issue. To me, this looks very bad!
Even if it doesn’t cause this autotune issue, it is an issue by itself.
Unfortunatly its not a parameter thats making all the magic, its really deeply related to your specific frame, motors, propellers, imu, dampering, …
My quad is really different, its a sub 200 g quadcopter with 5" propellers, my parameters are so different than yours!
change accelerometer filter and gyro filter, have a look at these links, I suggest to use imu batch sampling and fft, you’ll be able to measure yours vibration and its peak frequency, after you could also apply a notch filter to the main peak and I guess yours autotune will works again as happened to me 
To be honest I still make all these like in a thinkering approch, the guru in our community is Leonardthall, he’s the author of our incredible autotune mode plus several main features in controls and PID, thanks Leonard! 
http://ardupilot.org/copter/docs/common-measuring-vibration.html
http://ardupilot.org/copter/docs/common-imu-batchsampling.html#common-imu-batchsampling
http://ardupilot.org/copter/docs/common-vibration-damping.html#common-vibration-damping
P.S.: I hope devs will brings more powerfull tool to make this noise diagnosis and acts to cure it even better than now
I am used to watch the VIBE logs, and to me, except for some harder manoeuvres, looks rather good.
, it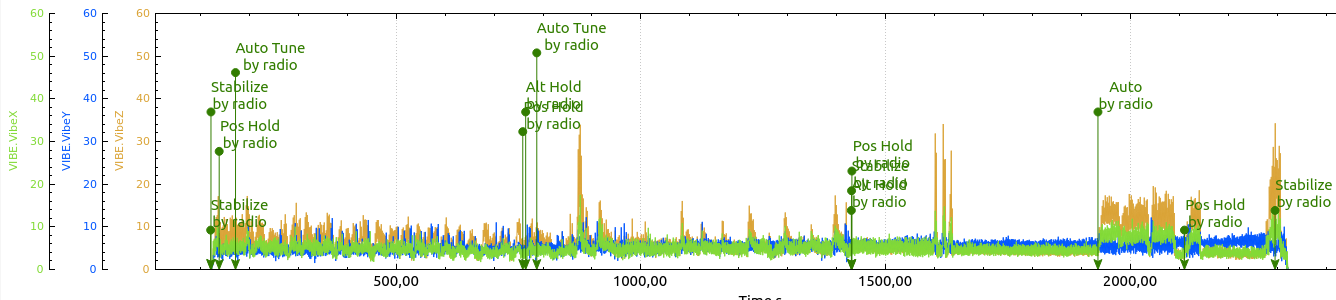
Hi Andre-K,
I’m not familiar with large copter, but on small copter its proven VIBE doesn’t show us the noise, you could have VIBE so low, but the real ones (maybe high freq noise) aren’t sampled this way and you cannot see it.
Please, give it a try, do a full FFT analisys and put the notch filter at the peak freq noise you’ll find.
http://ardupilot.org/copter/docs/common-imu-batchsampling.html#common-imu-batchsampling
this is the best you could make here, I really think yours problem its this one, otherwise I’ve not suggested you all this
Thank you for your help.
The imu_batchsampling page does not say anything about threshold values, or how to treat more complex scenarios like this:
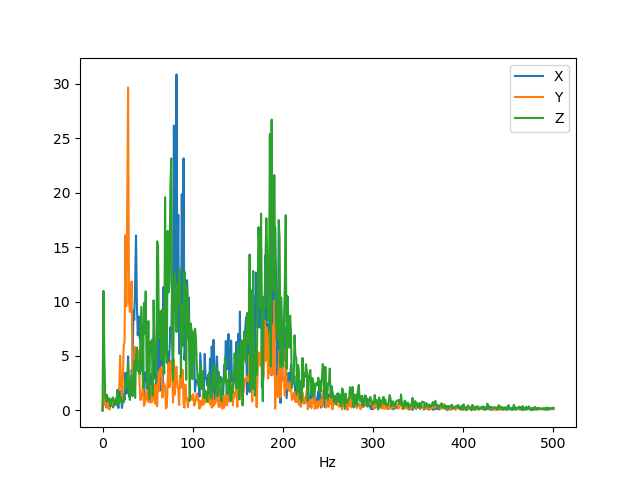
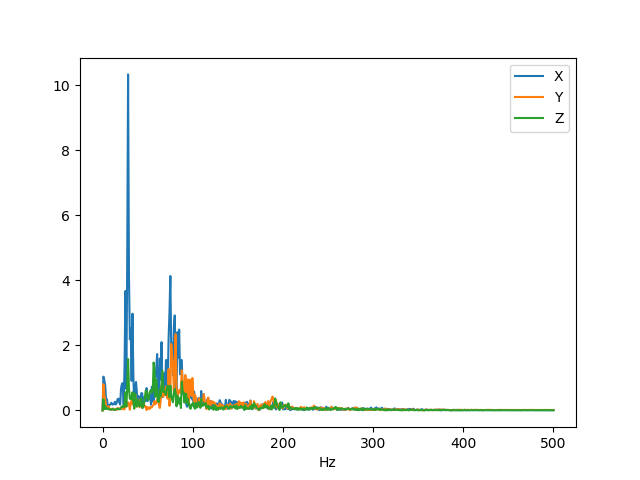
30hz , and 78hz are represented in both graphs, 190hz in Accel only.
@Leonardthall may I please have your opinion too ?
This is being caused by a very large roll oscillation in the aircraft. I would need to see a hover log with fast logging and pid logging turned on to tell you more.
I am not sure if it is a tuning issue or an external vibration issue.
@Leonardthall
Sorry, it took some time to get PID+batchsampling data. (due to other activities & weather)
I decided to fly the second X8 (building two of those)
So these logs are the maiden flights (hence frequent landing/checking)
Somehow, the magnetometer data got all wrong, lots of EKF trouble - given the size and weight of it, (23kg) I and slippery snow/ice, I chose not to do that dance again - but to fly it as-is. (log 2)
you can see in log , it were nowhere near holding position
I expected good data for vibrations anyway , also played a bit with PIDS underway.
Log 3+4 shows that the autotune will twitch only when I “provoke” it (usually using roll input) - in log 4 , I completed roll autotune by provoking twitch, I have done so before, but the same method will not complete a yaw tune.
Logs:
https://drive.google.com/drive/folders/1WFiWFEA96kbZdOw07G7lp-6dC9HXnu_U?usp=sharing
all is tainted with unhappy EKF,(and GPS glitches)… largly due to magnetometer.
-btw; I calibrated using the old 60s way, the onboard method never completed.
You did not turn on fast logging.
I don’t believe your aircraft can be auto tuned in it’s current state.
Sorry. I missed that instruction.
Yes, the compass EKF issues were a shame, the first of those were fine, and I’ll get this one calibrated just fine before gathering data next time.
The weather is again 8-10m/s wind so it will not be today.
@Leonardthall I added log 5,6,7 to share at https://drive.google.com/drive/folders/1WFiWFEA96kbZdOw07G7lp-6dC9HXnu_U?usp=sharing
I onboard-calibrated the only enabled compass again, (LSM303D on a Here module) - the calibration was successful, but it is obviously very wrong. before next flight I’ll check the LSM303 orientation or just replace the “Here” device.
In any case; I found a relatively quiet spot, with less, and more laminar wind, and log 6 and 7 should contain some hover-data.
Please save your valuable time if the bad magnetometer makes it more complex to troubleshoot, I can fly the first of those machines after Easter, and gather data with good compass & most likely less wind.
@Leonardthall
Uploaded log 8…12
Log 8: lots of manual twitching, no success. - some diagonal oscillation
Log 9: Successfull Roll tune,
Log10: Diagonal oscillations again, played with PID’s, but they are still there… Tried to autotune yaw, it was doing some sort of orbit instead.
I think log 8 may be the most interesting one, to me it seems that changing TUNE_AXIS midair, does not always work as intended , nor does changing between ALTHOLD and POSHOLD tune during one flight (at some point, I stopped from POSHOLD autotune, selected ALTHOLD, then enabled autotune, - and the X8 seemed to navigate as if it was in poshold.)
To sum it up; no successful yaw-tune, despite lots of manual twitching. (log 8)
You have a 26 Hz 2 degree oscillation and a ~1.8 Hz 10 degree oscillation, that is extremely large.
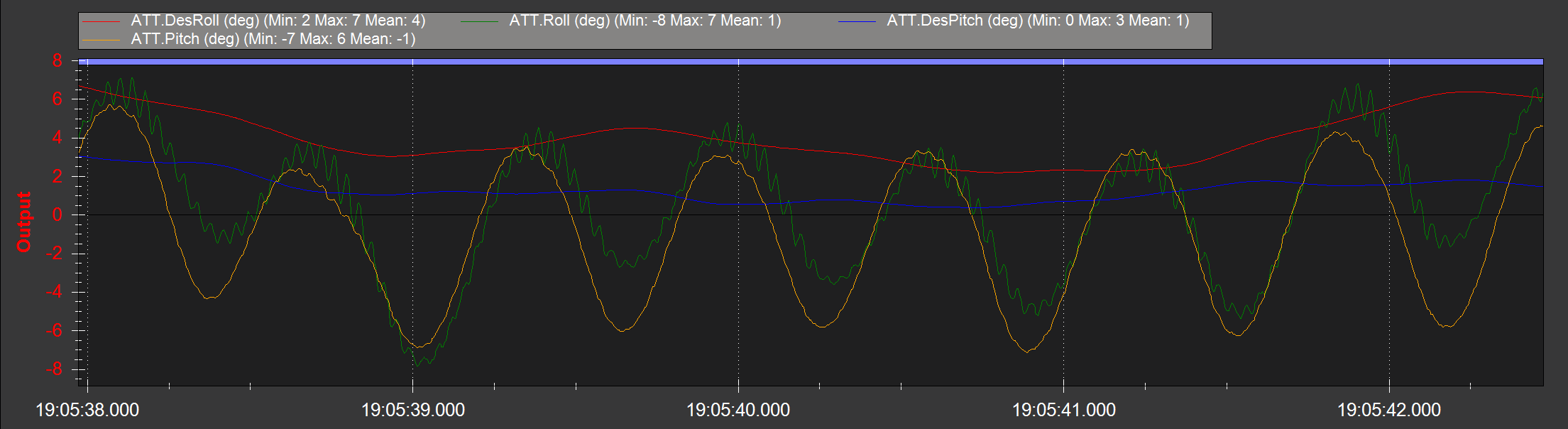
it appears to get worse over time.
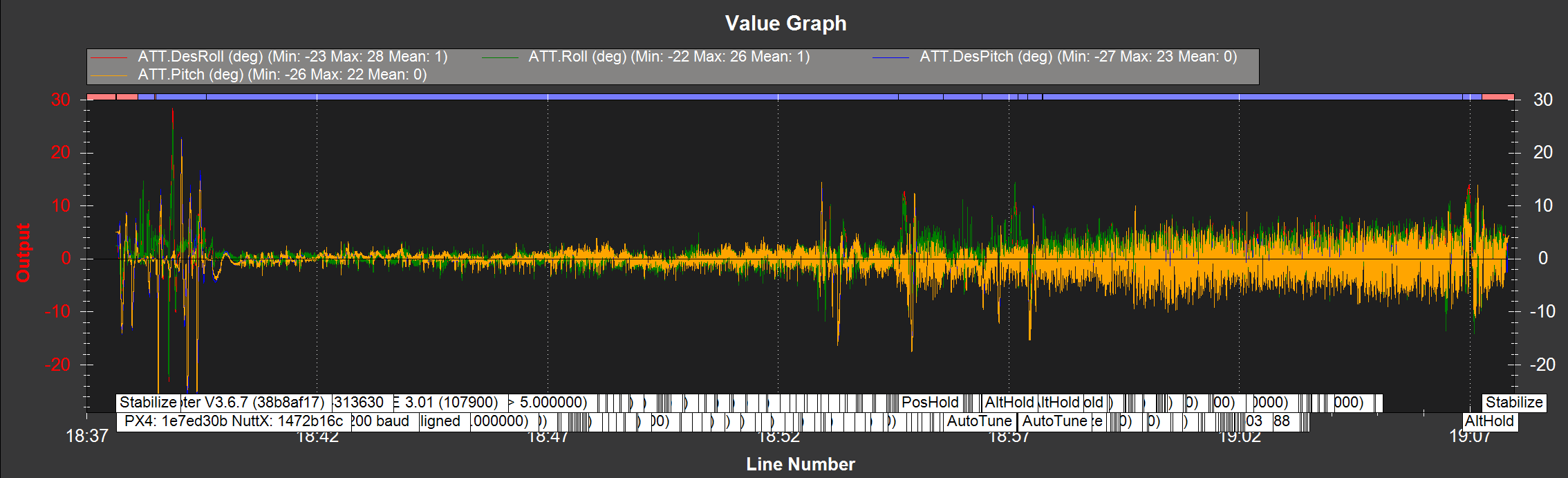
There are massive outputs to the motor mixers and the yaw output seems to suddenly start and stop being noisy. The roll noise is dominating the outputs to the motors.

Most of this 26Hz noise is coming in directly through your rate measurements.
When your motor outputs look like this you can only be great full you did not crash. There is nothing here for Autotune to work with.

You have a very serisous mechanical issue you need to address here. There is nothing we can do in the flight controller to deal with this. Something is loose. It is not accel vibrations but instead it is rate vibrations that are causing the problems.
Sorry I can’t offer more insight into this without actually looking over the air frame.