Hi guys, something really unexpected happened today. This quad has a very powerful motor prop combo, with an expected thrust to weight ratio of 3.2 when it is flying.
I’ve set the PID filter rates to 10 Hz, because the prop size is 22 inch, which I think is considered as a big copter.
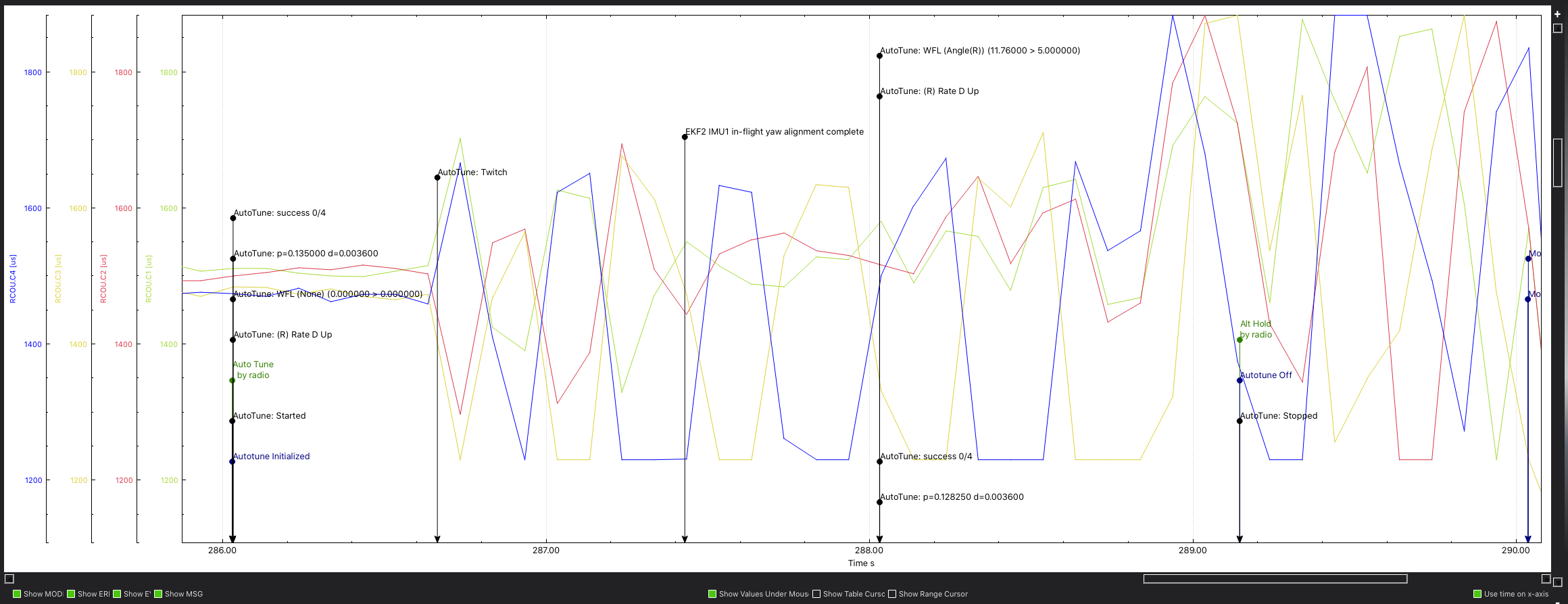
I started the autotune process with the default PID gains, for just the roll axis only. Immediately after flipping autotune mode, the copter went unstable and just blew up. I suspect its the default P gain being too large a value, but any inputs please?
Please tell me more about how it “just blew up”. Like it blasted into pieces? The way you say ‘went unstable and just blew up’ makes it sound like the instability and the blowing up were two sequential events…
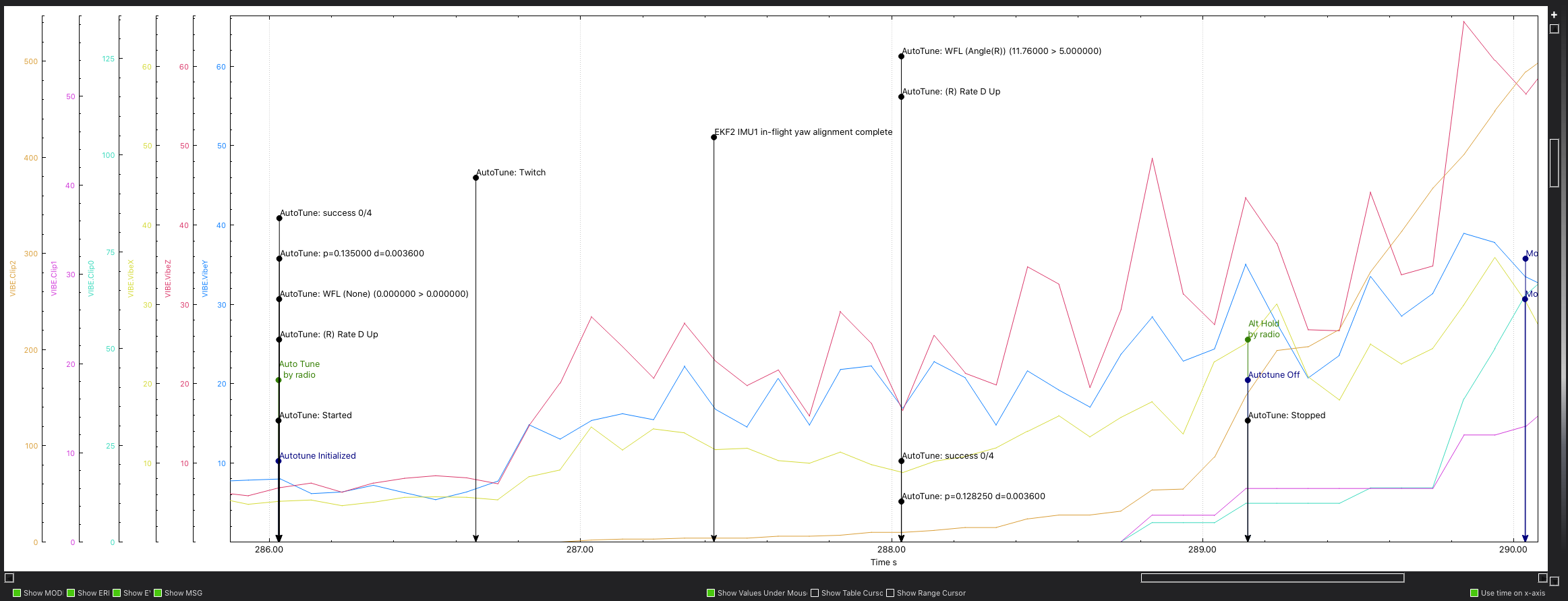
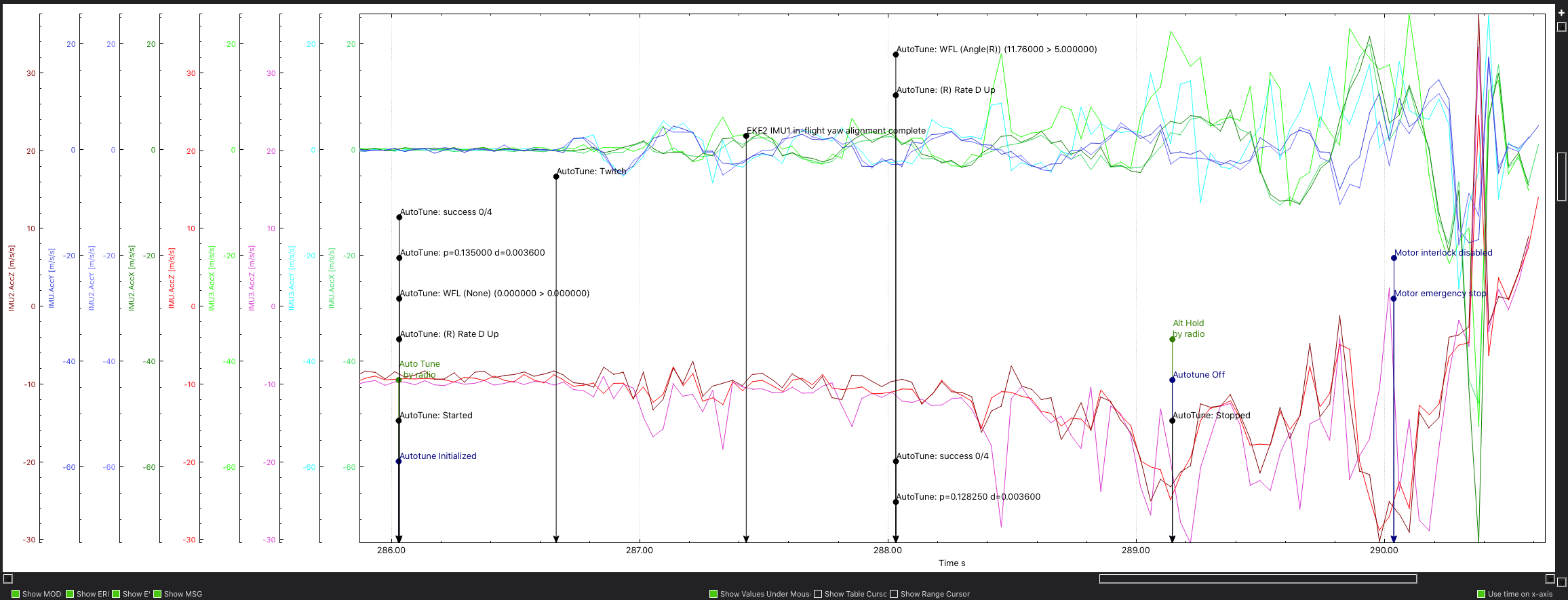
I also noticed the vibrations started as soon as I flipped the autotune on. The cube pixhawk is bolted on the frame securely so thats why I am so puzzled. Do you think there is something wrong with the IMUs?
As for the frame I believe it is rigid enough. I’ll rebuild the aircraft and follow this first and see what happens.