Hello all,
Today I went on a flight to AutoTune the roll axis on my hexacopter. I believe the AutoTune finished, so I went to land. I had some difficulties landing, but I was able to get it down smoothly. When I went to check my roll PID values on the Extended Tuning page on Mission Planner, I noticed that the PID values hadn’t changed. I made sure to leave the AutoTune switch on when I landed and disarmed. Is there a reason why they didn’t save? Did I make a mistake or am I missing something?
I also noticed on the Extended Tuning page on Mission Planner that I had “Lock Pitch and Roll Values” checked. Is this something that needs to be unchecked before an AutoTune flight?
Because it was in Land mode when you disarmed not Auto tune. The “Auto Tune Switch” is just another flight mode that will be overridden with a mode change from any source.
There isn’t a need to uncheck the lock roll and pitch values when doing an autotune. I just recently complete an autotune and I had autotune setup on a separate switch (rc_options 6 thru 10). Would arm and takeoff the copter in stabilized mode then switch to althold from there I would engage autotune. Once I got the chime back from the copter or the message in the ground control software (GSC) that autotune was complete. I would switch out of autotune then back into stabilized mode and re-engage the autotune switch land and disarm. That process worked every time and I got messages in the GCS that values were saved and verified that the values changed in the extended tuning
screen. https://ardupilot.org/copter/docs/autotune.html
Once Autotune completes you can just stay in Autotune mode and “reposition” to manually land and then disarm - this saves any confusion about what mode you are in or whether PIDs will be save or not.
This was not the case when I used autotune on an rc_option no matter what I did pid would never save. stabilized is your best friend until you get everything tuned it will provide the safest option to bail out of anything.
I have never seen that unless you switch out of Auto Tune with another switch selection (like this poster did). If you do that then you have to toggle the Auto Tune programmed switch from off to on to get back to Auto Tune. If after you use the switch to enable Auto Tune and don’t touch any more switches the PID’s will be saved upon disarming if it completed.
Thanks to everyone for the advice. Next chance I get to do an AutoTune flight, I’ll make sure to land without changing any flight modes. I’ll add to this thread if I have anymore issues with AutoTune.
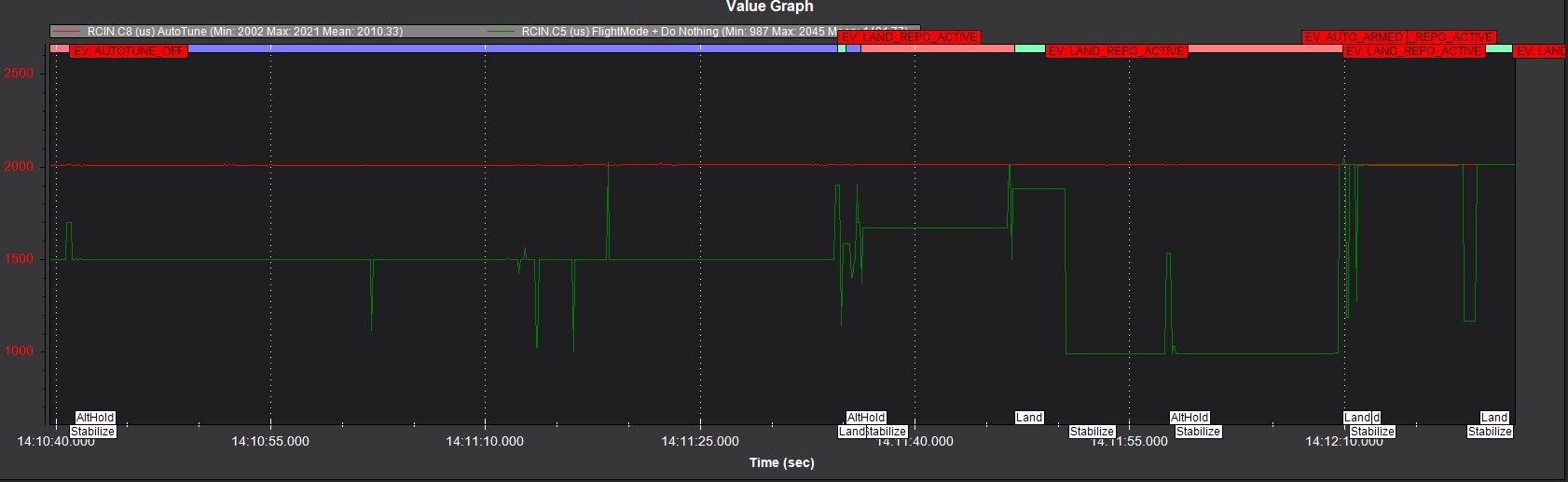
Because the conditions were favorable today, I ran AutoTune. The AutoTune finished successfully while in air. I heard two tones from the drone, and I took this to mean that AutoTune completed. While landing the drone manually, I heard another set of two tones. Then the drone started to descend rapidly. So, I quickly brought the drone down. However, I’m still inexperienced with flying, so the drone bounced and went up again. I then brought it down, and when it landed (rather forcefully) the battery unplugged. Because of this, none of the AutoTune values saved.
I’ve fixed the battery mount to prevent another unplugging. I also reviewed the data logs, and I would appreciate some help with analysis. In the logs I noticed “Err: EKF_PRIMARY-2,” “Err: GPS-2,” and “Err: FAILSAFE_VIBE-1.”
Here is the data log: https://drive.google.com/file/d/1NGbnnHaDKnQcCo9gwNawJqkEnvEgqSz3/view?usp=sharing