I have built a Large Octo and the Yaw is quite unstable. At one point the copter was slowly spinning on its own. I have not completed the 3 axis Auto tune yet.
I want to get the Yaw stable before I try the other two Axis.
The autotune on Yaw Only ran for about 18 minutes before I had to land because of batteries.
Can someone take a look at this logs and give me some pointers?
You need to sort this first before any autotune is going to help.
Are all your motors level?
Is your frame flexing under load?
What ESC are you running? If D-Shot, are they configured correctly for normal PWM?
Have you been through the new tuning guide?
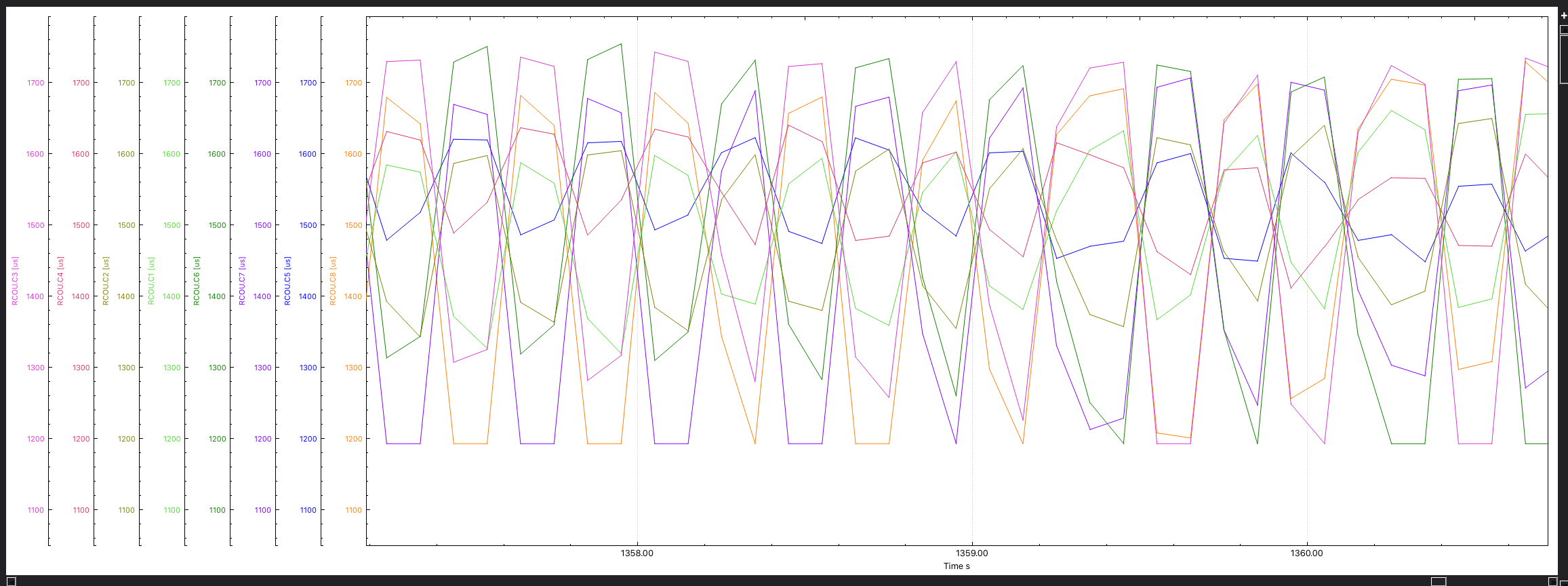
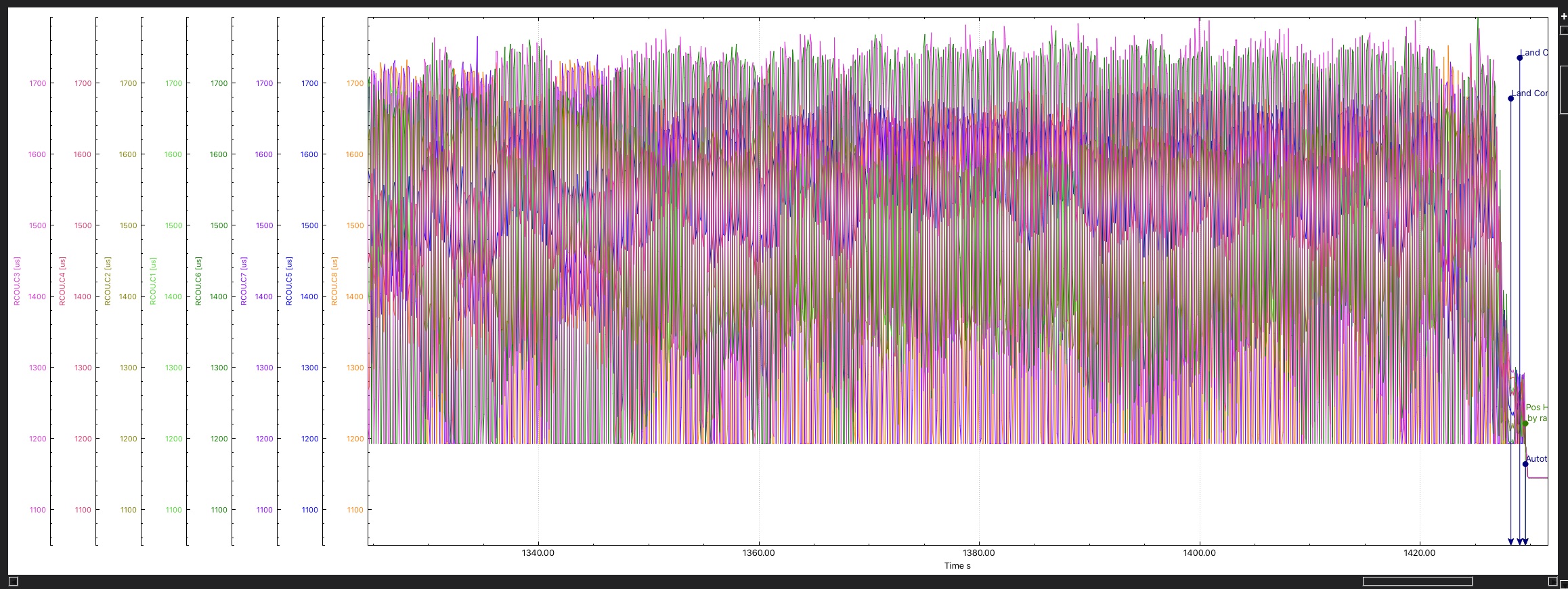
For your entire flight the motors are pulsing wildly from maximum to minimum.
All Motors are level
They are Tarot 4114 329KV with 16x5.5 props
The frame is not flexing at all from what I can see (no vibrations in the compass stalk either)
The ESCs are 40A Arris SimonK firmware (yes I know about the DeSync issue)
Yes I have been through the tuning guide and set everything to a T.
I did see the motors sitting and pulsing when I looked at the logs but I wanted some experts to comment and see if they were seeing what I saw.
I am about to rip out the SimonK ESCs and replace them with Holybro Tekko32 ESCs and run Dshot 150 like I did on my quad that you helped me with.
It seems like I have Zero luck with Simonk and any of the Ardupilot FCs that I use.
How did you arrive at the Pitch/Roll Rate I&D parameter values? Particularly the D terms. Granted I have not built a craft that large but many times when I have seen an oscillating mess it can be due to this. The gyro filter also but it looks like you have that in the tuning guide ballpark.
You may want to set those back to default, set logging to batch, option to 0 (pre-filter gyro data) and perform a test flight for a minute or so in AltHold to capture some hover data. Then view with FFT to see what you have.
What’s the recommendation from CUAV to mount that internally isolated FC?
Those values were the last ones recorded from an autotune session that I did a couple of weeks ago. (haven’t touched it since until today)
I think at this point I am going to…
Remove the SimonK ESCs and replace with my Holybro Tekko32 ESCs and run Dshot 150(which for me seems to run sooo much better)
Reset all values back to factory settings.
double check with CUAV on mounting the FC
Try autotune again
I just completed a ~550 build. 13" props so nothing like yours but this time instead of running Autotune initially I followed the dynamic notch filter guide 1st (you would need V4.0 beta) and using throttle based reference (you could use ESC telemetry based with your new ESC’s). Of course I followed the initial tuning guidelines before running this. After enabling the dynamic notch filter with the data logged and analyzed with the FFT function in flew darn good just on default PID’s. Then I ran Autotune. This process got me to a great tune quicker than any other method I have used.
Yea, same recommendation for Cube’s which have a soft mounted IMU. I kind of doubt the problem is related to the ball mount plate you are using is too compliant but maybe. Connect ESC telemetry, could be useful.
Hint-Maybe you know this but chances are “Low RPM Power Protect” will be enabled on those ESC’s. That won’t work with those low kV motors so disable it from BLHeli Suite.
For such a big bird and motors, i would not recommend blheli. I have Tarot X6 with the same motors and hobbywing xrotor 40A. They fit in the arms and they are fantastic. No issue with CUAV Pixhack V3. Or even the xrotor 50A but you have to mount them then underneath the motors.
Why not? They have worked fine for me with larger/low kV motors. Nothing wring with HobbyWing Xrotors to be sure but I haven’t had any issues with BLHeli firmware ESC’s on any multirotor.
This is the same as any FC with an IOMCU. I have read a few posts suggesting the Dev’s are working on a fix for that.
The CUAVv5 supports up to 14 PWM outputs. First 8 outputs (labelled “MAIN”) are controlled by a dedicated STM32F100 IO controller. These 8 outputs support all PWM output formats, but not DShot.
With regards to BLHeli and why not, I have yet to see a valid reason for this.Some simply say “they are suited to “racers” only” which is not definitive and others didn’t understand the settings for low kV motors. There were countless posts suggesting this when all they had to do is disable a feature meant for high kV motors.
BTW-I believe Ardupilot supports 11 outputs, of any type, on the NanoV5. Hardware file suggests so.
@dkemxr I will say it was a weird feeling soldering the motor leads onto the ESCs and not worrying about motor rotation .
Once I got everything fitted up I ran a motor test, noted which were spinning the wrong way. The programmed the motor rotation to reverse. So much easier.
One thing I have not figured out is the BLheli pass through. I have tried but BLHeli_32suite does not recognize the ESCs.
I am currently using an Arduino configured as a 4 in 1 interface and that works great.
Just setting SERVO_BLH_AUTO has worked for me but you can try SERVO_BLH_MASK and set the channels you are using. On older non-32 ESC’s I use an old Naze32 board for ESC config. Similar to what you are using the Arduino for.
Yes, changing motor direction in firmware is the way to go. I never use bullet connectors, just solder them up and configure.
I think I read the dialog about Dshot on the IOMCU outputs on the Gitter site. Not easy to find stuff there…

 Even though CUAV told me they did.
Even though CUAV told me they did. .
.