Hi! Last day i try to autotune my small plane dart 250g.
I set AUTOTUNE_LEVEL to 7 in firs flight and 8 in second.
In previous autotune session i probably move stick too lazy so now i try to move it faster. Much faster than needed. So autotune sometimes not working as i see from logs.
So i have 2 questions
- Why it not work like on copters. From the pilot’s point of view, it’s not clear how to move the sticks properly. It is not clear whether the autotune algorithm recognized your action as an attempt to autotune.
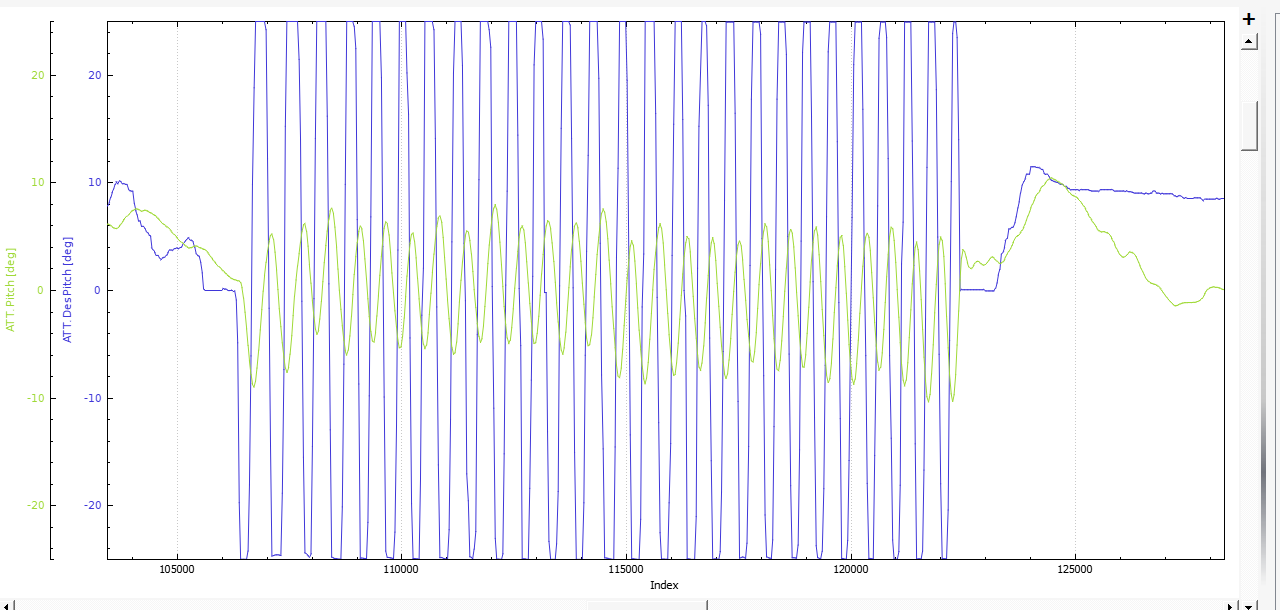
- As I understand, autotune did not work from the logs because the max angles (-25 25 for pitch and -45 45 for roll )were not reached. Thus, if I add angles to the osd, will it be possible to judge by them that the plane has reached the final point and can I move the stick in the opposite direction?
link for logs
https://1drv.ms/u/s!AuFPVI_eDaZbhMcZ5_ePPpgAVt860A?e=ZpGh7u