UPDATE:
Finally, after repairing the damage, restoring the PIDs, adjusting some parameters and making a crude manual tune the drone is now flying well enough. I attached logs with this new tune at the end of the post.
The problem was definitely caused by an autotune with the AUTOTUNE_AGGR set way to low, that resulted in a bad tune with ridiculous low values for the PID gains. Then, me failing to recognize that the values were completely wrong and trying to fly with them, leading to the crash.
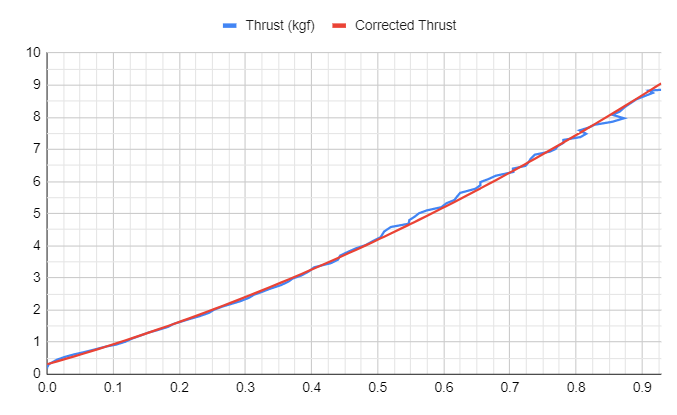
One of the parameters that I also changed for this new tune, was the MOT_THST_EXPO. At firsts this parameter had been set to 0.8, as suggested by the “Tuning Process Instructions” in the Ardupilot Wiki. This value of 0.8 is set to be a good approximation for a 30” diameter of propeller. But I was not very confident about the reliability of the parameter as the powertrain I was using is a combo motor/ESC and I was afraid that it might be compensating in some way for the exponential response of the motor thrust. So, I tested the motor/ESC in a thrust stand, collect the data and experimentally calculated the correct value.
The result was a MOT_THST_EXPO equal to 0.4, way different to the original 0.8, and also very low for almost every size of propellers, as shown in the graft of the “Tuning Process Instructions”.
In my opinion this also confirms my suspicions that the ESC was somehow compensating for the motor response.
The result of the calculations is presented below.

At the end, I also do not know whether the effect of the adjustment of this value is appreciable or not. But the drone is flying and the mistakes are not going to be repeated hahah
LOGs: https://drive.google.com/drive/folders/12Xuvm-OGdEj-W3KmyOLHAfsQG-pTV-4F?usp=sharing