I’m finally getting around to tuning an EDU450 (stock hardware, Pixracer R15, 4s 2300 battery). I had it set up with the Alt-a initial settings then tweaked with the preloaded settings in MP for the reference frame.
Tuning flight 1, pitch and roll. Just managed to get done before the battery was dead. This is when I noticed the Prearm error: ACRO_BAL_ROLL/PITCH. I didn’t pay much attention at this point because I was going to swap in a new battery and try out the tune.
I was out of data range so I couldn’t look up this error. I now know it’s because the Stabilized roll or pitch value is too low. I decided to reset my parameters to a previous flight and try again. This time I just tuned the roll value. The flight took a while but finally finished, I landed and try to fly it. Very quickly the roll began to slowly oscillate and I could see the oscillation getting bigger. Lucky I landed in time.
Reset the parameters again and tried pitch. Basically the same story, but this time during my test the pitch got so out of control I couldn’t get it on the ground with the spinning side up. Only damage is a prop but unfortunately I’m a long way from home and I don’t have any spares with me.
The machine was flying okay on the initial tune, I just wanted to make it better. My only issue was it wasn’t holding altitude as well as I wanted. I’m confident in the machine mechanically, but I’m not ruling out a setup issue. Please let me know I’ve overlooked or of there’s something wrong in my initial tuning that’s causing autotune to mess it up so bad.
I haven’t had a chance to look at your logs yet, but a phugoid oscillation like you’re seeing is usually both P and I too high. As to why Autotune is causing it, my guess is that it’s starting with P, and lowering it, which causes I to run wild (I should never be greater than P). Best thing to do is follow the tuning guide to the letter. Tuning Process Instructions — Copter documentation
Here’s a param file from an Edu450 with Cube Orange/Here3 and 4 cell Lipo, AC 4.0.7. This should safely get you off the ground, it had flown and done notch-filter-data-gathering by this stage, and an Autotune for pitch and roll I think. Edu450 basic tuning params.param (1.1 KB)
EDIT: adjust INS_HNTCH_REF so it approximately equals your MOT_THST_HOVER , you’ll see those in the list
Thanks for the parameters. I’ll give those a shot next time I’m out.
I’d really appreciate it if someone could look at my logs and tell me why the auto tune went so sideways. I’ve been flying this for a few months on the 4.0 reference parameters that @james_pattison linked. Like I said, it was acceptable, just not as good as I felt it could be. But I hadn’t had the chance (or weather) to really work on the tune so that’s why I was getting to it now. If I messed something up I’d like to know.
I looked at the Tune 3 log and couldnt see anything astounding. A few things like the HNOTCH setting are different, and the PIDs are a little different - but not radically different.
The Edu450 I got these settings from was minimalist, no additional payload. Cube Orange in mini-carrier bolted direct to the top plate, Here3 stuck directly to the top of that. There was also a Holybro Tekko32 45A 4-in-1 ESC with “Low RPM Power Protect” turned off, but only fed with PWM , DSHOT and telemetry was not configured. RFD900UX and TXMOD for RC and GCS Telemetry.
It was a repeatable build, settings and all => Build, calibrate, copy over all the usual params, fly to test, rinse and repeat. Heaps of them were also built with the standard ESCs that come in the box.
One-way range about 23km due to battery capacity
Coming from you that’s a vote of confidence that I haven’t totally botched it up. Thanks!
This is also intended to be a simple, and very repeatable build. I have a group of students building the same right now. I’ll try out your parameters and if that works I’m going to have to alter my initial settings for them.
I’m just thinking out loud, I’m thinking that this build might be a bit over powered on 4s with the Pixracer controller. If that’s so, would that contribute to the auto tune issues?
Thanks @xfacta for the parameters! They seemed to really work well. I did a few of flights with it today and I’m pretty happy with it. I’ve attached a log from a short flight, and an auto mission. I know the battery was low on the short flight log, this was one of those “oh, one more thing” kind of flights.
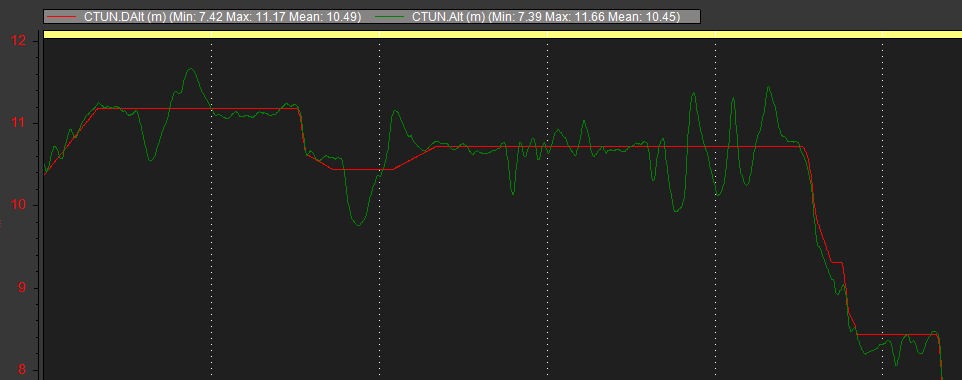
Can you please have a look at the logs and tell me what you think of the tune performance? It looks good in the air, but when I look at the log I wonder if it could be better. Specifically can you see anything wrong in the altitude performance?
The GPS update rate is good. VDOP seems a bit odd and maybe that’s where the problem is coming from. Try this and see if it’s any better:
GPS_GNSS_MODE,65
And this should help a bit too:
ATC_THR_MIX_MAN,0.5
I would highly recommend setting these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
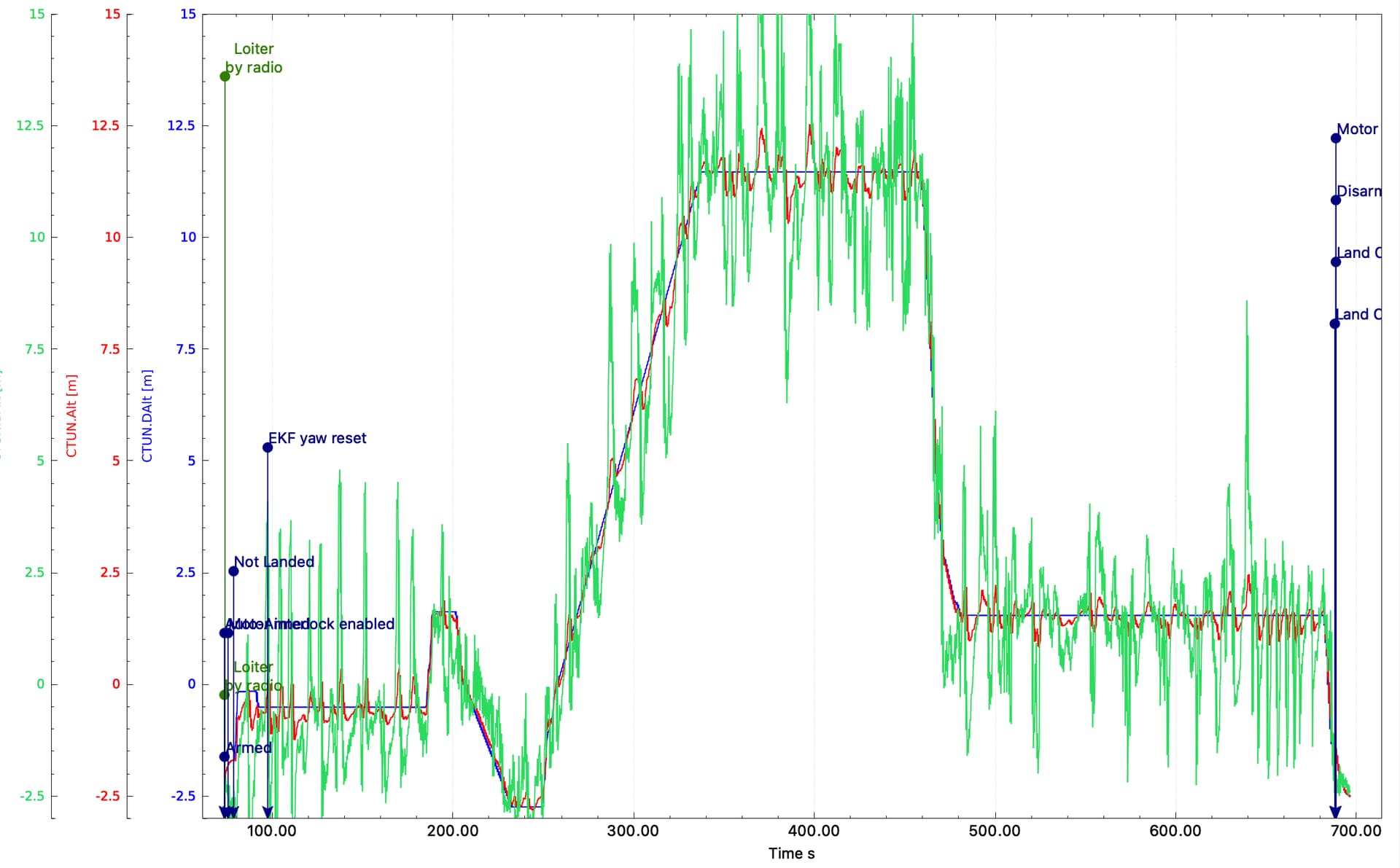
I hope you can clear something up for me. I did two more flights today, the first with the changes you suggested, plus an edit of my own: I noticed that the MOT_THST_HOVER value was consistently down around 0.15, so I decided to tweak PSC_ACCELZ_P and I accordingly (0.15/0.30) as per the tuning guides.
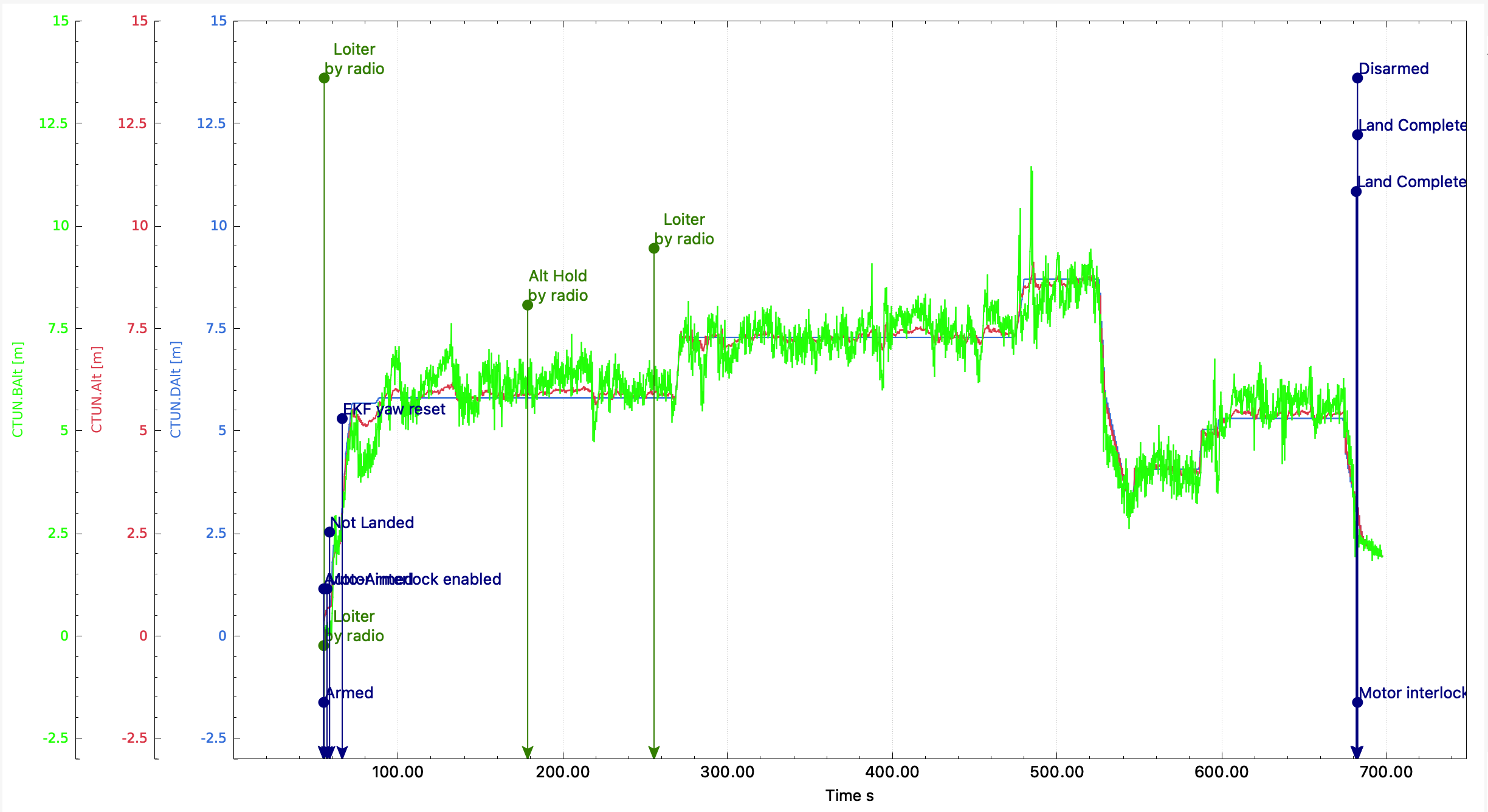
As you can see it didn’t go well. The altitude performance was very poor. So I returned PSC_ACCELZ_P & I to a previous known value of 0.19/0.38. That really improved things.
Still not perfect, but much better. I’m thinking I may bump it up again to .2/.4 or more.
My question is, am I on the right track with these adjustments? Should I keep raising PSC_ACCZ_P&I? Do you think an increase of EK2_ALT_M_NSE would be wise? (Currently 3, so maybe move it to 4?)
Hey guys, I need a hand here. I think I’ve taken for granted how well Autotune has worked for me in the past and now it’s not working I’m having a real time getting this quad dialled in. @xfacta 's parameters have been a big help, but it’s that last bit I’m struggling with.
Problems:
Altitude performance is still poor. I ran an auto mission today to test and it’s up and down, when it should have been level at 30m. I’ve also noticed when in loiter, it will climb or descend when I yaw.
The pitch and roll seem to have a slight oscillation relative to the desired point. The quad looks smooth in flight, but to me it just doesn’t sound right. The motors aren’t hot, but I’m already dealing with single digit temperatures so maybe it’s relative.
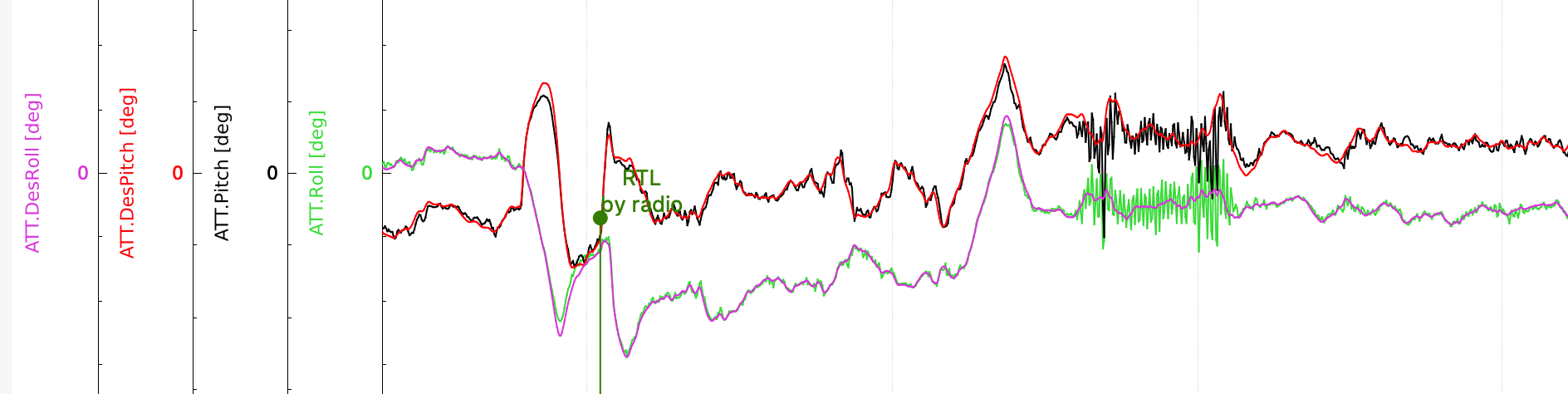
(this is probably related to the first two points) In the descent to land during RTL there was a significant pitch and roll oscillation.
I’ve got some ideas but before mess with the tuning too much and send it on a moon-shot, or a dirt dive, I’d really appreciate some help with where to go next.
Altitude seems to change a bit in relation to yaw so you could try “yaw PI term to 0.5 and 0.05” (shamelessly lifted from one of Leonards posts)
Otherwise try a yaw autotune and see what values it comes up with.
Had a couple of good flights today. I’ll share my parameter file (that has the loiter settings from Shawn’s file) I think the D-term is still a little bit off based on the logs. I can still see the minor fluctuations in the actual pitch and roll values, but it flies well even in higher wind and I can’t hear the “burble” in the motors any more. And I may continue to play with the yaw PI from 0.6/.06 to the 0.5/.05 values that Shawn previously recommended.
For my build though, this tune more or less solves the problems I had mentioned earlier. Feel free to try out and comment on the parameters. My build is probably lighter than most EDU-450 builds so proceed with caution.