so I just maidened my ZOHD Dart with arduplane 3.9.1 on an omnibus f4 v5.1. It seems as if the FC forgets the tune every time I land.
I start and do the hole autotune thing. Land and when I start again it’s back to sluggish and I have to repeat the whole process. Any ideas why that is? As i understand it the values are saved every 10s.
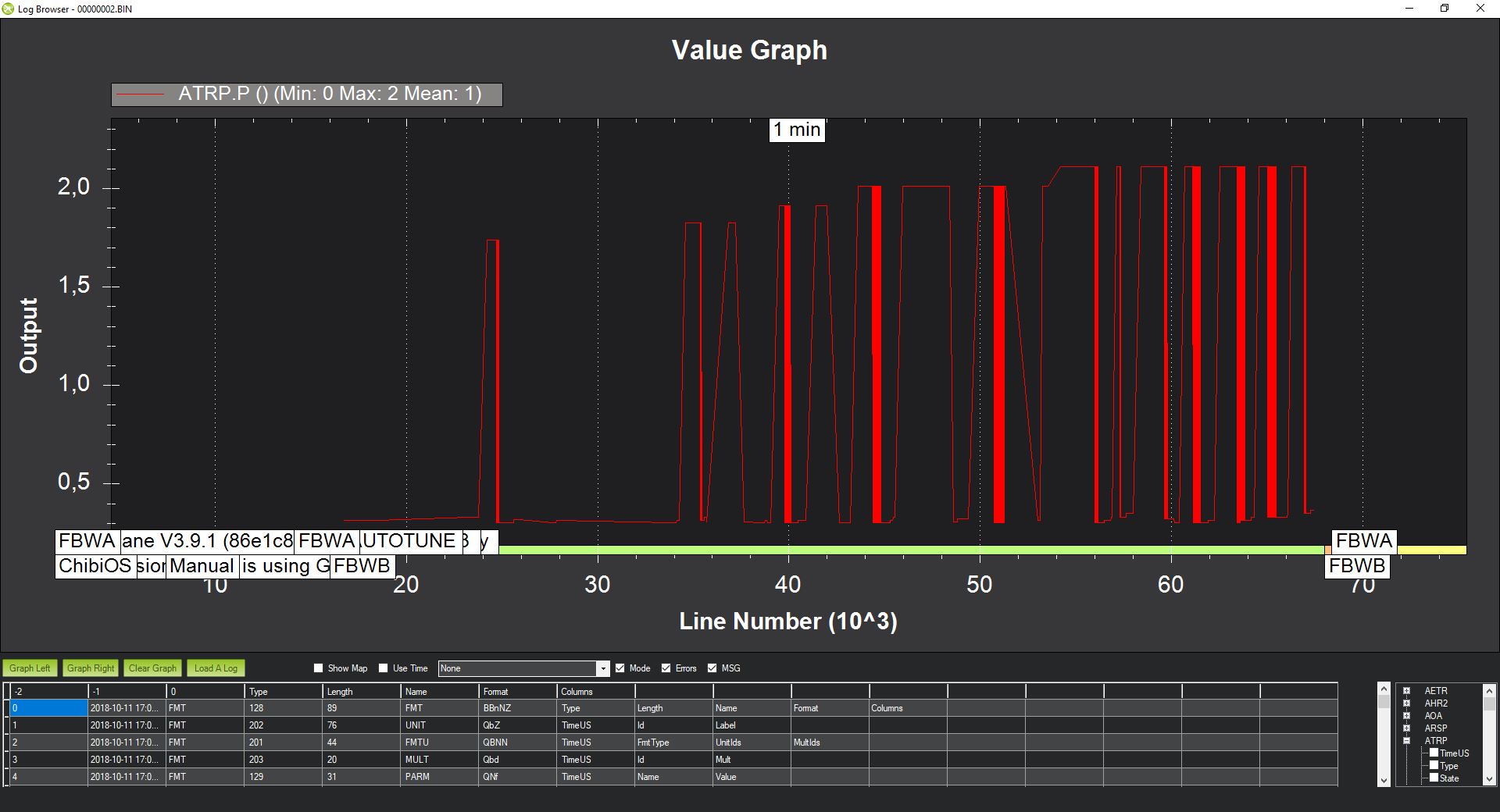
When is look at the ATRP.P value it seems not like the picture in the Wiki. I included my log if you want to take a look for yourself. Any help is very appreciated.
Hi hunt0r thank you for helping. I have read the autotune page a couple of times and either i am blind or stupid (both very possible)but I cannot find a solution. I have successfully tuned 3 planes before. I’m reading trough the how to read a plot thing as we speak.
I’m not sure how to do it in Mission Planner (which seems to be what you’re using) but here’s an important bit:
The ATRP message has a “Type” field that shows what type of autotune is being recorded. A Type value of 0 is for roll tuning, and a value of 1 is for pitch tuning. When graphing ATRP results you should choose data with a Type of either 0 or 1 (not both).
OK so from from what i can see i was right in the assumption that something is off because the PID tuning of the Autotune FM does its job correctly. The question is why it will limit my servo throws as if it was my first start after each landing.
I think either I don’t understand your question, or you don’t understand how the AutoTune works.
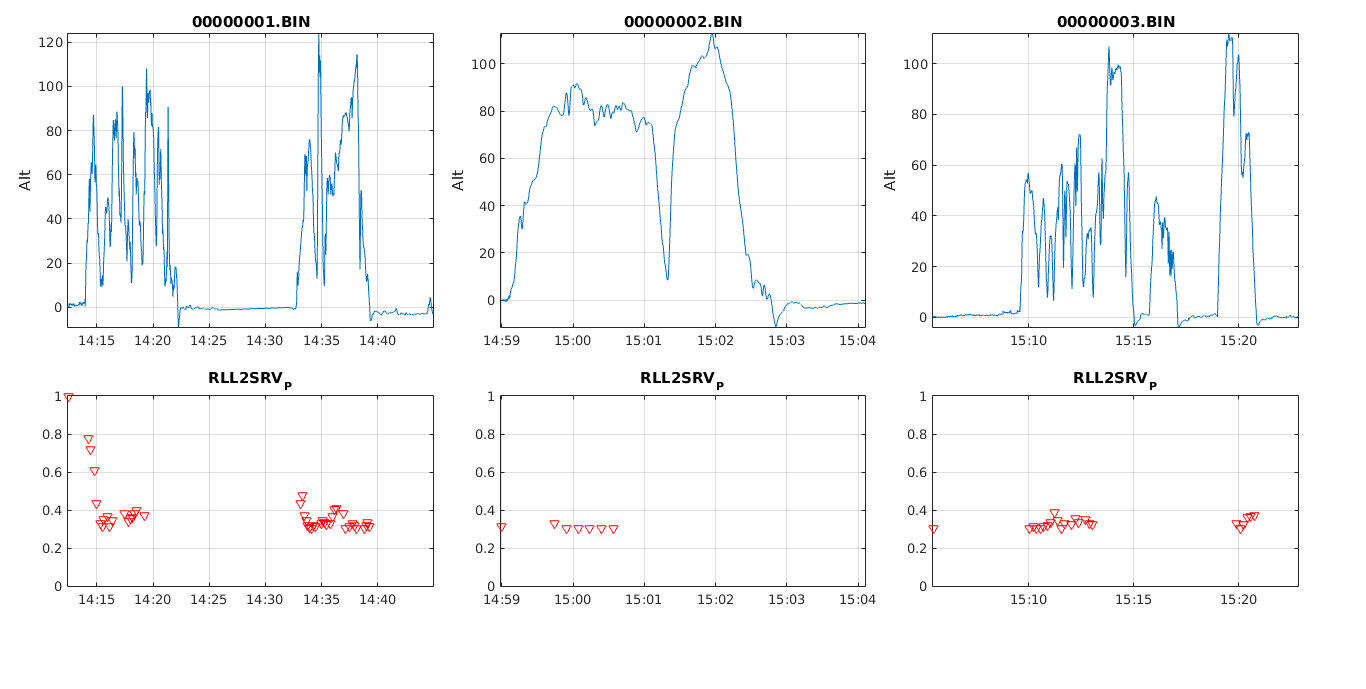
AutoTune is supposed to “learn” the gains of the flight controller as you fly. I see that your 3 logs were all on the same day, documenting about 5 flights. As I look through your logs, I see the RLL2SRV_P value being learned via AutoTune on every flight, and each new flight begins where the last one ended. I’ve attached a plot showing all 3 flights, side-by-side, and the value of RLL2SRV_P as it was learned from it’s initial value of 1.0 to it’s final value of 0.3699 at the end of the 3rd log.
Does this agree with what you find? If not, could you help me to understand your question?
Ah okay i think I really did not now how to read the logs thanks for clarifying. Since I now know that autotune works the question remains why I the aircraft rolls right for the first maybe 20s after launch. After that everything is working as intended.
There could be a number of reasons. Do you fly first in MANUAL mode? If yes, do you observe the “roll right” bias in that, or only in some different mode?