After trying to use autotune for 3 times and 2 crashes after autotune, I am considering to tune it manualy.
Frame is a 12 kg MTOW Octacopter. Frimware Arducopter 3.5.5, FC is Pixhawk Cube. Motors 400 kV, Props 15".
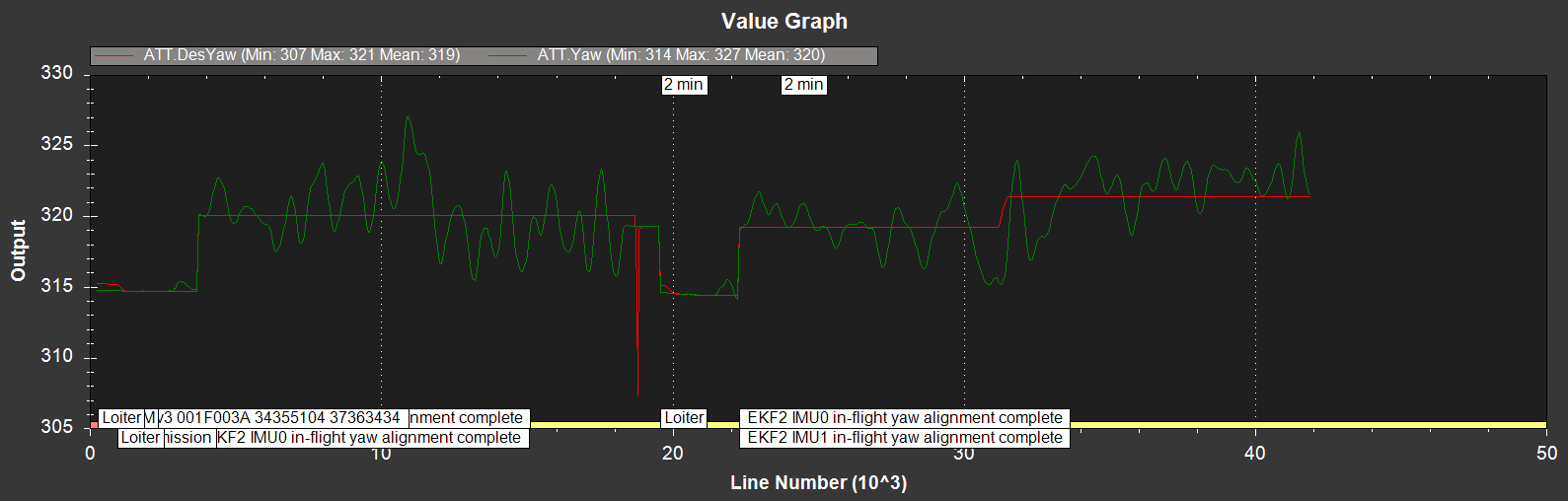
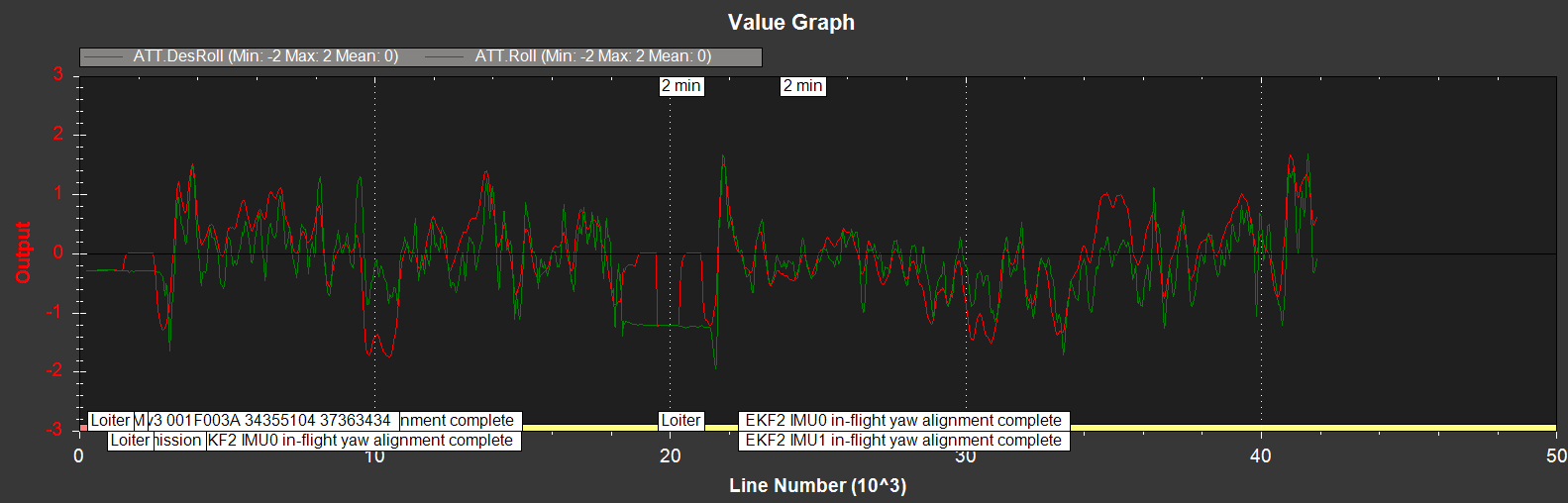
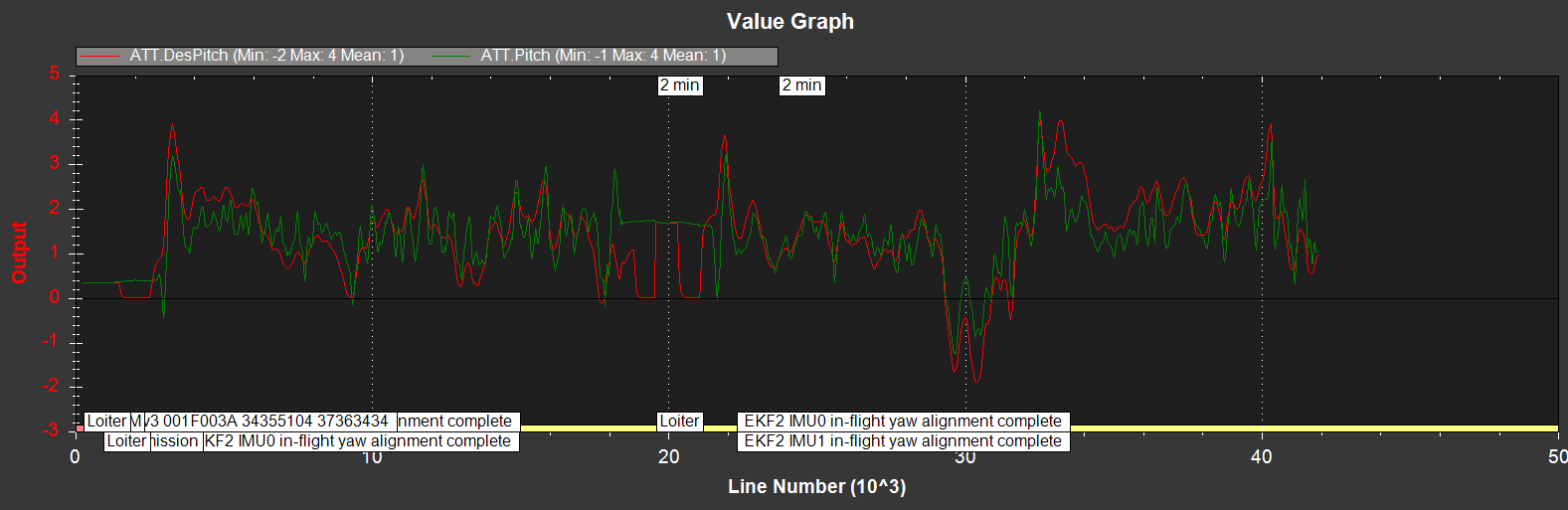
Because of the 3 degrees +/- offset on the rotors, YAW is very agile and hard to tune but PITCH and ROLL are not solid either. What is the right direction to go on the PID’s?
See link to log file from latest flight.
https://drive.google.com/open?id=14laI6srAPZSqeeDBSeGoUIsFdoZ97P9h