Hello!
I have an Autotune problem. After overwriting the new pids, the drone in the Alt Hold mode is very sensitive and precise to stick movements, while in the Loiter mode the drone bouncing during the flight. Watch the video. Which parameters could I change to achieve better performance?
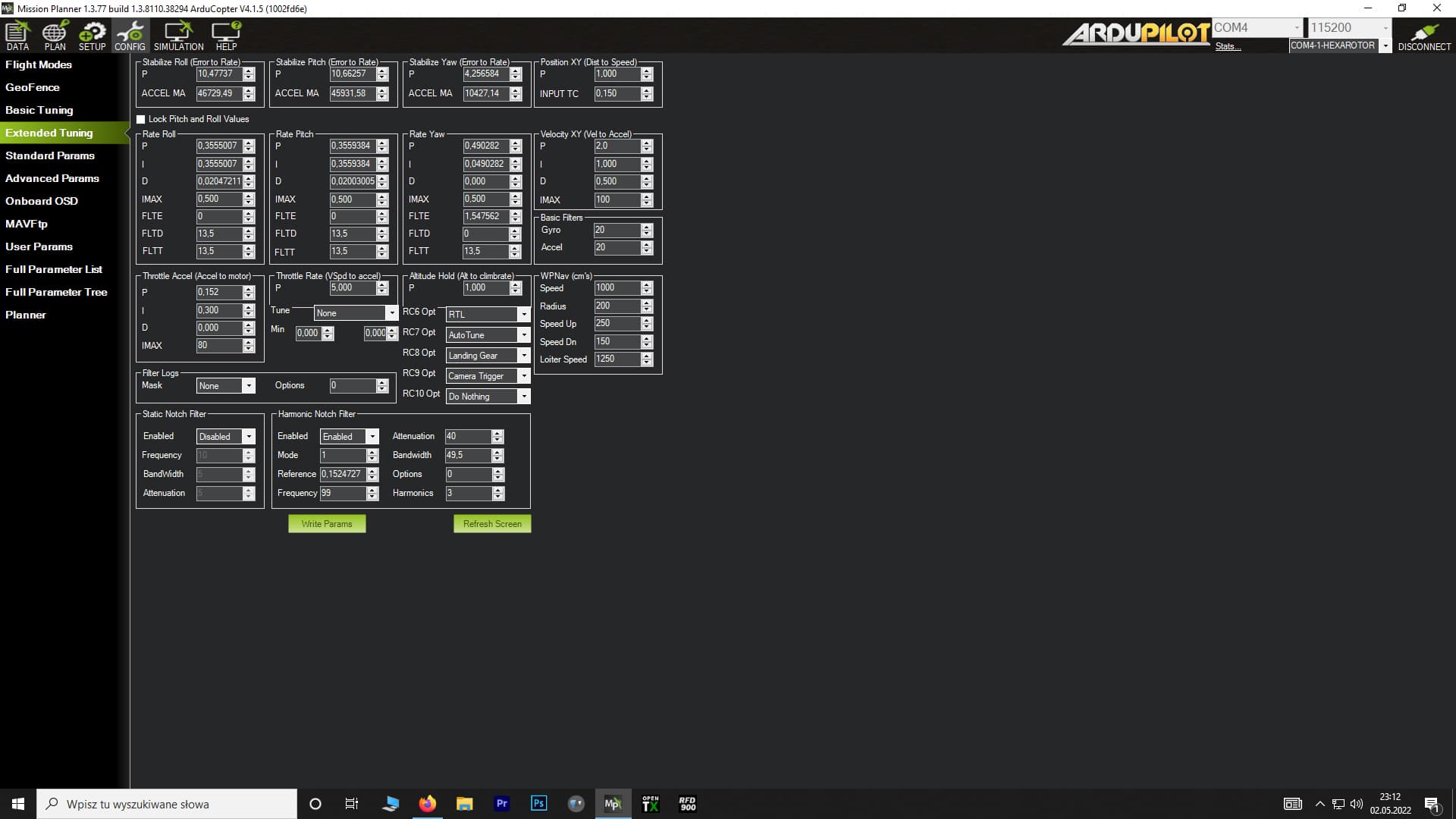
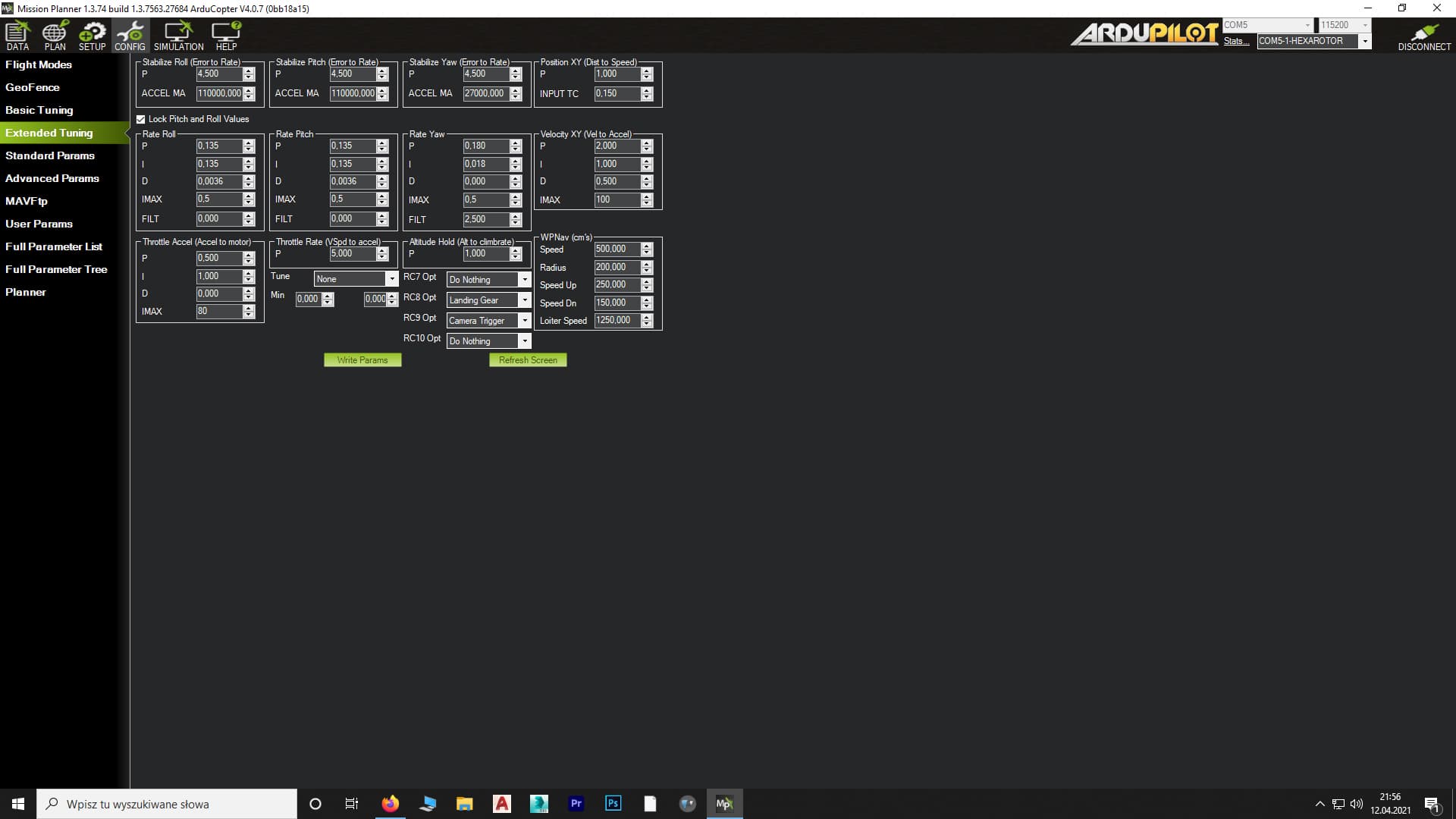
Autotune was performed after all moving parts on the board were immobilized, with the Harmonic Noth Filter set correctly and the correct settings for 17 "propellers according to the file “Initial parameters”.
Your Pitch and Roll Rate PIDs look quite high - could be a sign of problems.
Remove the camera and gimbal before autotune, or at least the camera, and start with the minimum take off weight then later change these to suit a payload
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
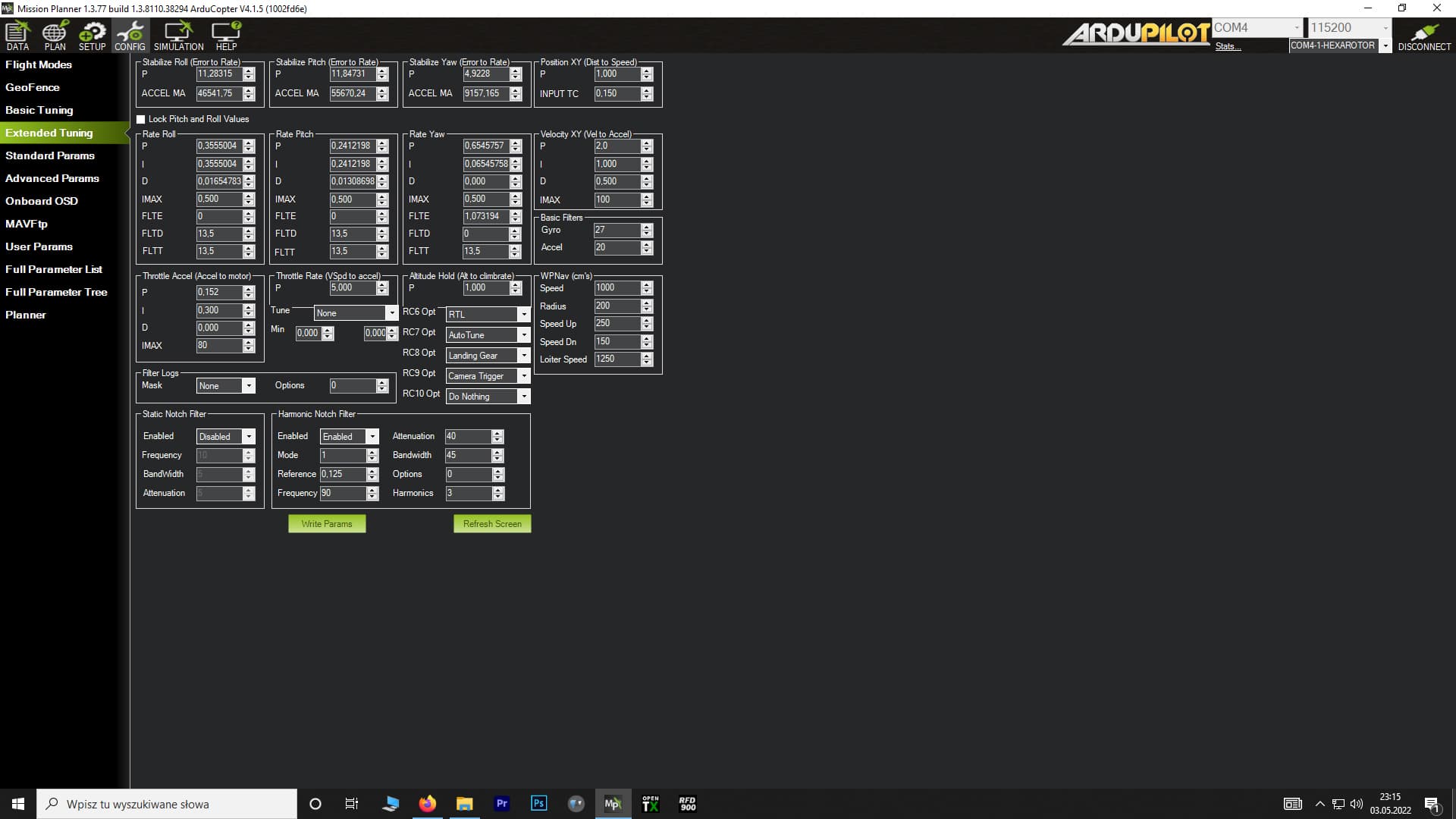
I think your HNOTCH frequency should be down around 80Hz instead of 99Hz. Have you got a .bin log with
INS_LOG_BAT_MASK,7
INS_LOG_BAT_OPT,0
so we can check.