As you can see in log file, Tunestep was 2. In docs Tune step has that eplanation:
0 = Returning towards Level (before or after a test), 1 = Testing (i.e. performing a twitch to test response), 2 = Updating gains (twitch completed and gains adjusted)
so what does that mean? what can I do with that gains?
Thanks for any help!
Because the log is full of “failing to level, please tune manually” messages. It was not in a good state for Auto Tune to succeed. These can’t be good:
ATC_RAT_RLL_I,0.01698473
ATC_RAT_RLL_P,0.02198472
They were
ATC_RAT_RLL_I,0,03396946
ATC_RAT_RLL_P,0,04396944.
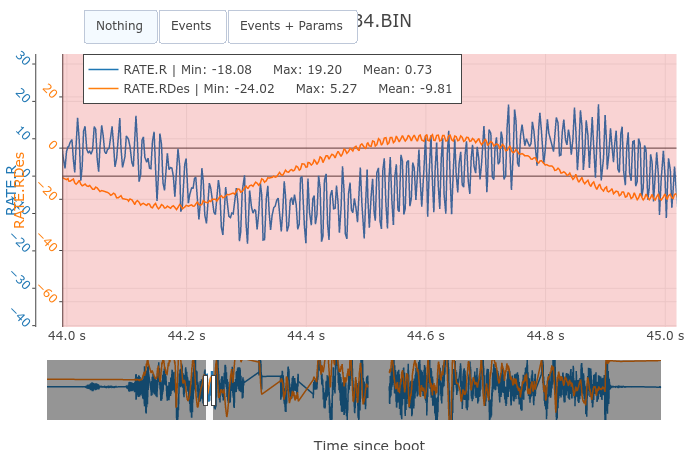
But with that values It didn’t even started twitching. So looked at Rate.R and Rate.RDes and halfed it. With that values it twitched like 50-55 times.
So let me ask that: with my old values there was a lot of oscillation and I halfed ATC_RAT_RLL_P/I/D values but now these values aren’t okay because they are so little. So I guess there must be some other things that cause oscillation. So what can it be? May be stabile p?
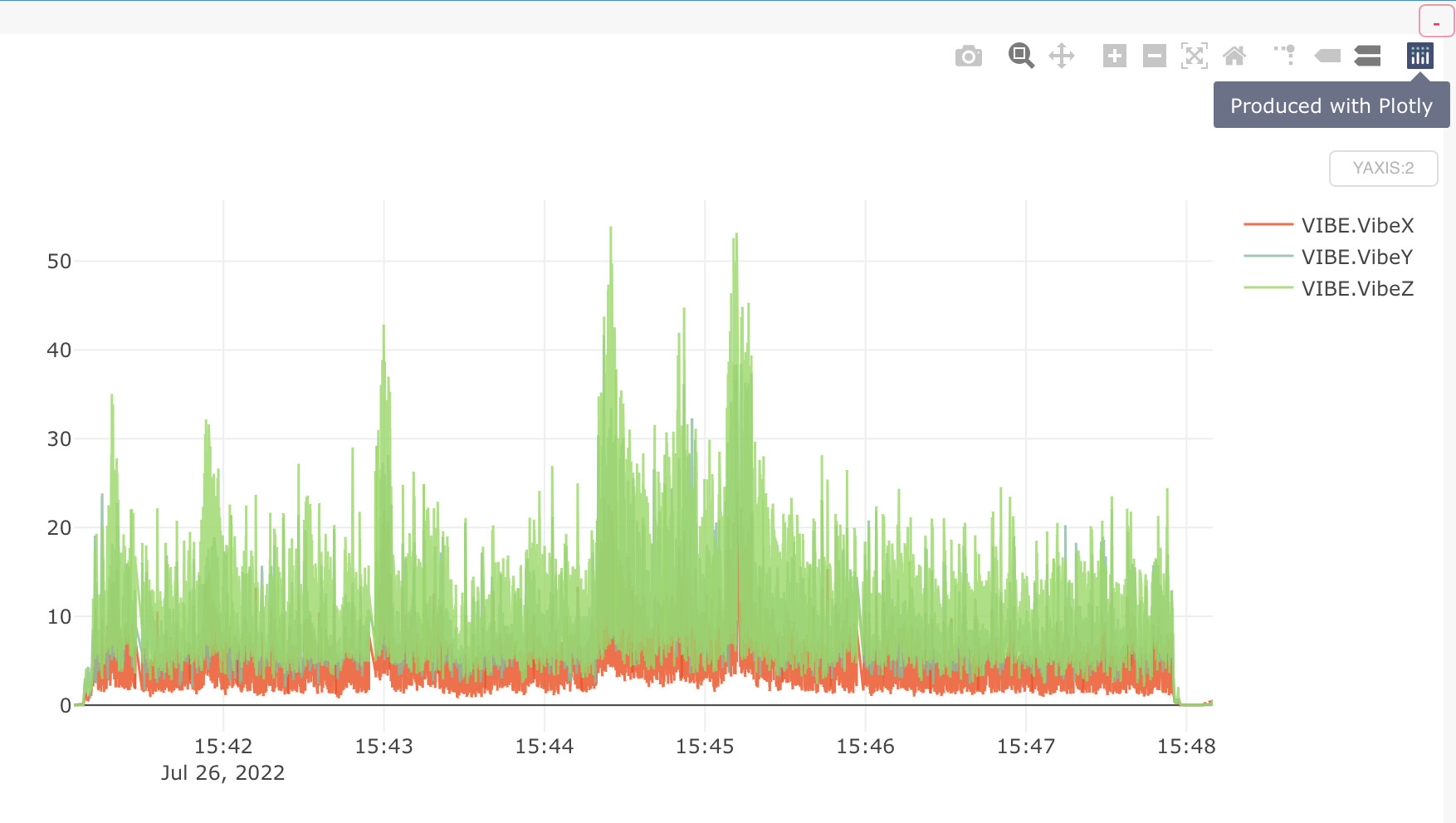
In my opinion, you have to much flexibility in the plastic arm-holder.
Seeing your z-vibration with up to 50 whilst hovering (throttle out of 0,15) underlines this hypothesis. You need to get your arm mount strengthened
The other thing I forgot to mention is that you need to improve your distance of the gps (compass). They are too close to the battery, which will cause wrong measurements especially with power variation (induction)