@panascape so… What are you using the wing lowering for??
We wrote a blog post answering this very question https://theeyeabove.co.za/2020/08/10/our-quest-to-create-the-perfect-uav-for-the-african-bush-continues-and-we-though-that-you-may-be-interested-to-hear-of-our-latest-development/
1 Like
Hi Robert, I have to ask:
The drone will spend probably less than 10 seconds of a typical 2 hour flight below 2m AGL, potentially in ground effect (or less than 1 percent of the flight), yet you’re spending an inordinate amount of engineering time and effort to design a folding wing to use as landing gear.
Not to mention dramatically increasing the complexity, weight, fragility and parts count (and defeating the KISS principle https://en.wikipedia.org/wiki/KISS_principle)
Wouldn’t the effort be better applied on other optimizations?
Hi Graham, yes limited time near the ground but a lot can go wrong during those 10 seconds. The wing mechanism serves multiple functions though. It allows the wing to be folded for transport with no disconnecting of wires (the next version can automatically fold and unfold itself), there is no landing gear obscuring the camera at any point during flight, the foot print for landing is reduced and its more stable during hover. Because of our motor setup we always needed a different motor spar attachment method and the wing hinges are actually part of that mounting system. The system we came up with is actually very light and very robust. It also allows the UAV to takeoff from a car roof rack without having wings sticking off the edge.
We have been quiet for a while partially because of Covid and also because a lot of progress has been made. We printed a prototype on the HP

but realised that the EOS was actually going to be a better option as we can get the full wing sections into a single build.
The new print is underway and once assembled we begin flight trials.
2 Likes

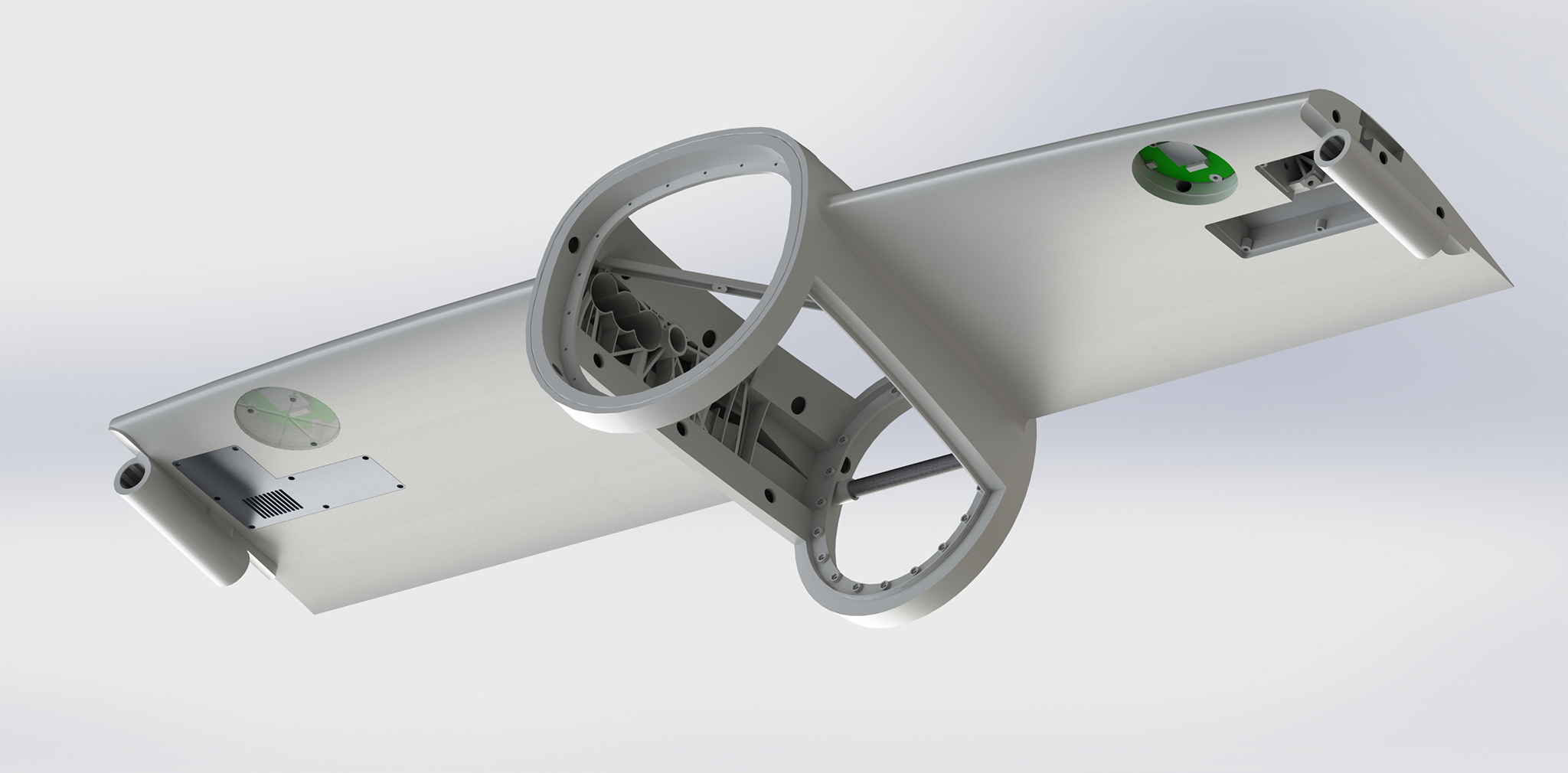
The airframe is now 100% complete and all parts have gone off for printing and fabrication. This render shows all of the SLS printed sections and the milled foam aerodynamic shells. Wings are now lowered permanently unless additional horizon view is required for the camera.
1 Like
Looking good Robert, may I ask why you’re keeping the wings lowered as this introduces anhedral which reduces roll stability making the aircraft more susceptible to wind disturbance on the lateral axis and causing the flight controller and servo’s to work harder to stabilize the plane?
We kept part of the wing level to provide some compensation for this, this configuration CFD tested as having the best lift to drag, and balanced level flight characteristics with stability during VTOL. If our CFD is wrong, the wing is held in place by the mounts for the wing lowering mechanism so its easy to change back to a full lifted position.
Response from one of our engineers “There is a reason why the wings are partially lowered and that is to gain more favourable lift at our design speed and therefor extend the mission distance. In addition to this we still have a large enough inner wing area to provide adequate roll stability. We also have a payload that lowers the Cog to slightly below the wings and therefor helps with lateral stability. The outer wing tips provide a slight dihedral that provides some help with roll rates”
I’m a beginner to the hobby, so take what I say with a grain of salt.
Your planes wing profile looks wrong, for long endurance and loiter, you want long, narrow wings, like a gliders wing profile. See reconnaissance type uav’s wing profile (https://en.wikipedia.org/wiki/Northrop_Grumman_RQ-4_Global_Hawk). Also, have you considered stationary cameras mounted on trees or poles, to supplement your monitoring?
Hi Tom, its a lot more involved than just long narrow wings, wing area, air foil choice and lift to drag ratio all come into play as well as the operational specifications. The TR200’s wing design has a full aeronautical engineering team behind it and has gone through 100’s of hours of evaluation and simulation to ensure that its one of the most efficient wings for its particular role. Its a 2m wing that can lift 6.6kg at 7.5° AOA and a cruising speed of 16 m/s and it has a very good Lift to Drag ratio.
Cameras on polls are problematic because of the large areas of very rough terrain that need to be covered, plus wild animals and elephants cause issues.
1 Like
Nice design. In fact, it is my first time that I see the quadplane setup with the tilting back motors and fix front motors. Most other design intend to tilt either all motors or only the front motors. I wonder how that bird behaves during transition phase, using the back motors at the horizontal stabilizer to gain speed. Any experience with this setup (in reality)?
It was something we were not sure of ourselves. The rear motors are set back enough that they don’t do a lot of the lifting work and are over specced as far as propulsion goes. All of our simulations show that there should be no problem as the front rotors continue providing lift until the UAV is past its stall speed and Hyundai’s E-VTOL has adopted a similar configuration. In addition our rear Motors can tilt 180° to provide thrust assisted breaking (reverse thrust is not an option with a VTOL quad) and also have full yaw control so we are going to need to work with the dev team to implement this.
Thanks to the amazing work by @tridge and Brandon McDougall we now have a simulation model that is pretty close to validating our own calculations and simulations https://youtu.be/UP0H2AYhNtQ
2 Likes
Just a quick update, the dream is almost a reality. The 1st airframe is days away from being assembled.

3 Likes
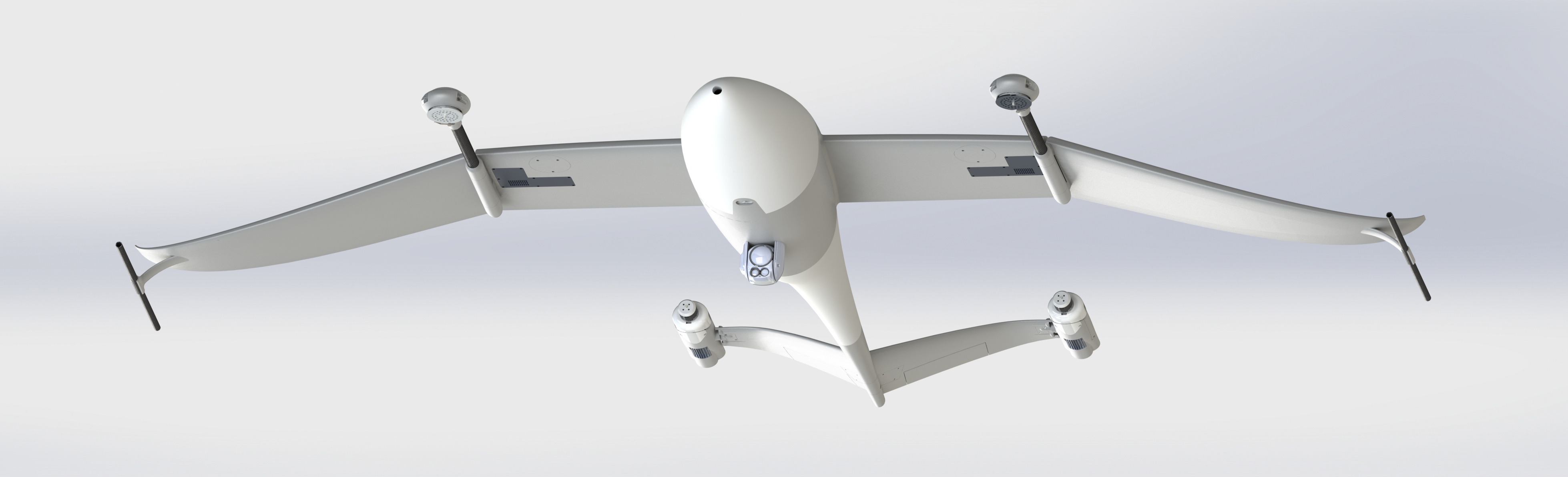
We had planned to unveil the airframe at a drone conference in South Africa but Covid-19 caused a change of plans so It ended up being unveiled from my living room. It is a little larger than I realised 
Here is a video look around. It is now getting final tweaks and its electronics fitted.
2 Likes
Hey Robert,
that bird looks nice - an aerodynamic marvel, as nothing is troubling the air stream. Is this the final, fully equipped version? How did you solve the air speed sensor mounting (as I can’t see any holder, nor pitot tube)? I am furthermore curious how you could get the structural strength in the wing and the stabilizer, as the full weight (plus landing forces) need to be withheld at the very tip of the wings, and the stabilizer has to support substantial lifting forces at take off and landing… - though, I guess that it might “only” be about a 5th of the total weight for the stabilizer section. But still…
It’s hard to find words to describe how amazingly cool this aircraft looks. It looks absolutely fantastic!
Am I correct in thinking the rear motors are completely inside the red circle I drew below?

I’m building my first QuadPlane myself so I’m far from an expert but those motors sure look small for the size of the aircraft they are lifting and propelling. Can you share your hardware choices? I’m really curious about your motors, ESCs and propellers.
That wing tip landing gear is one of the coolest things I’m seen. I don’t blame others for being a bit skeptical of this type of landing gear but it sure looks cool.
I’m really looking forward to seeing this thing in flight.
Thanks for sharing details about your project. And of course, good luck keeping the rhinos safe.
Hi Pascal, the wing tip landing gear is actually a little bit of a concern in practise. While the FEA and the calculations suggest that the wings can handle the force the physical observations have prompted us to move the landing struts inward to the wing hinges. The landing gear is still a part of the outer wing but the new version of the outer wing, currently being printed, will be less risky. your are correct5 in that the tail is only carrying about 1/5th of the weight, just over 1kg and its actually a very strong component and nowhere nearly as fragile as it looks.