I had few incident where my mode automatically changes to some random mode once the communication is lost.
I am not able to understand the logic behind it. I have not programmed it anyway. I was just doing some random flight test, it does not happen in all flights. It happens only in some flights randomly.
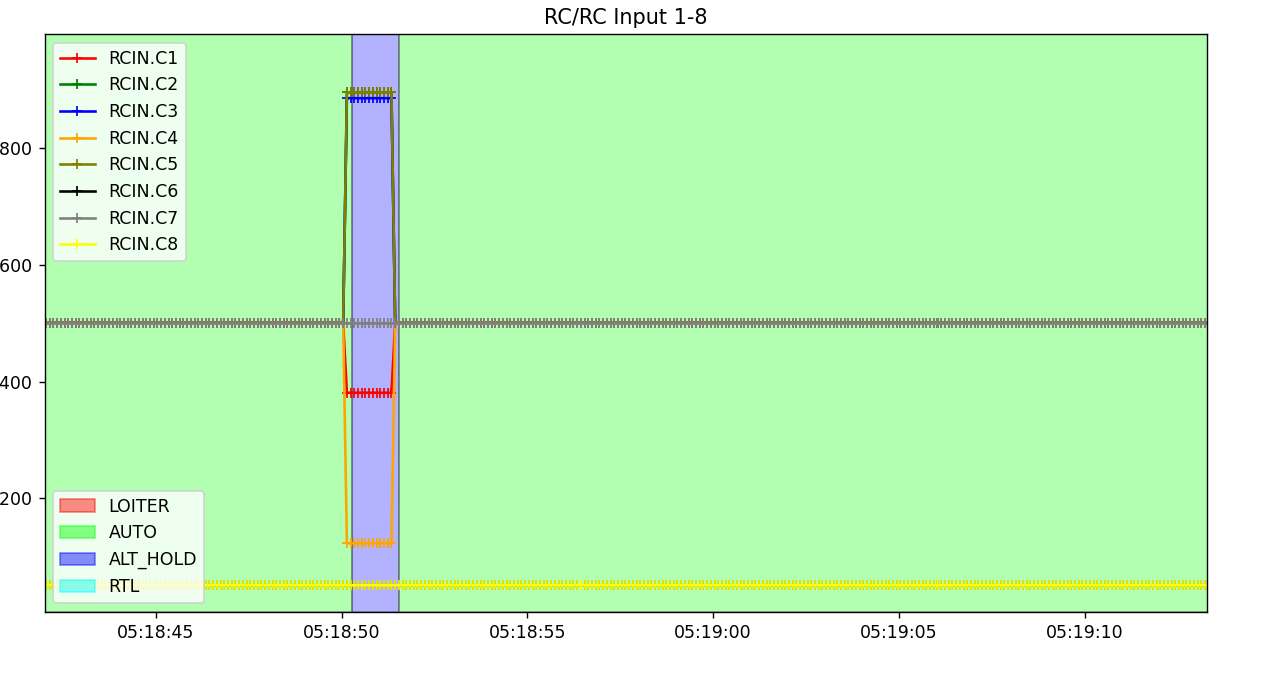
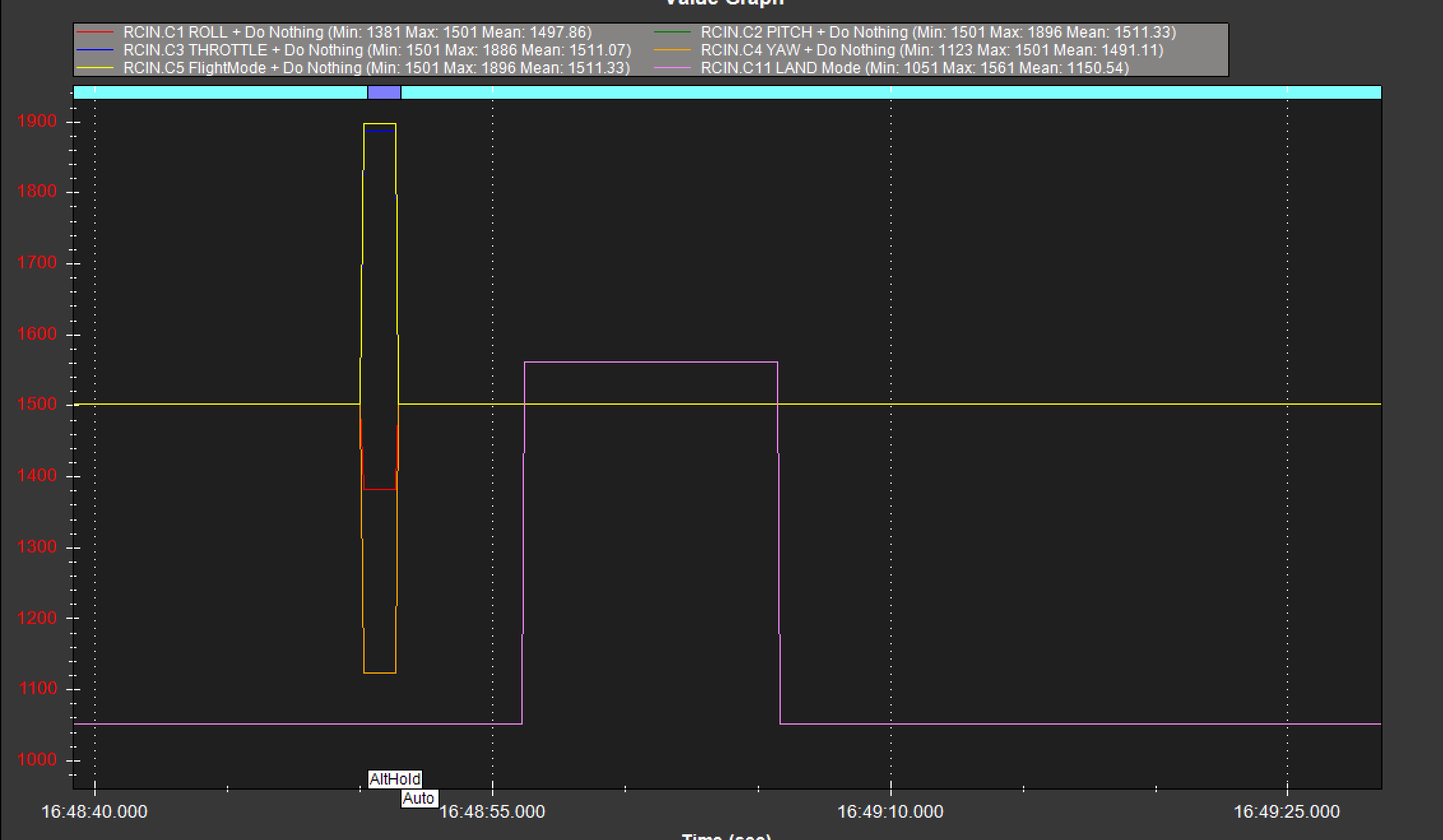
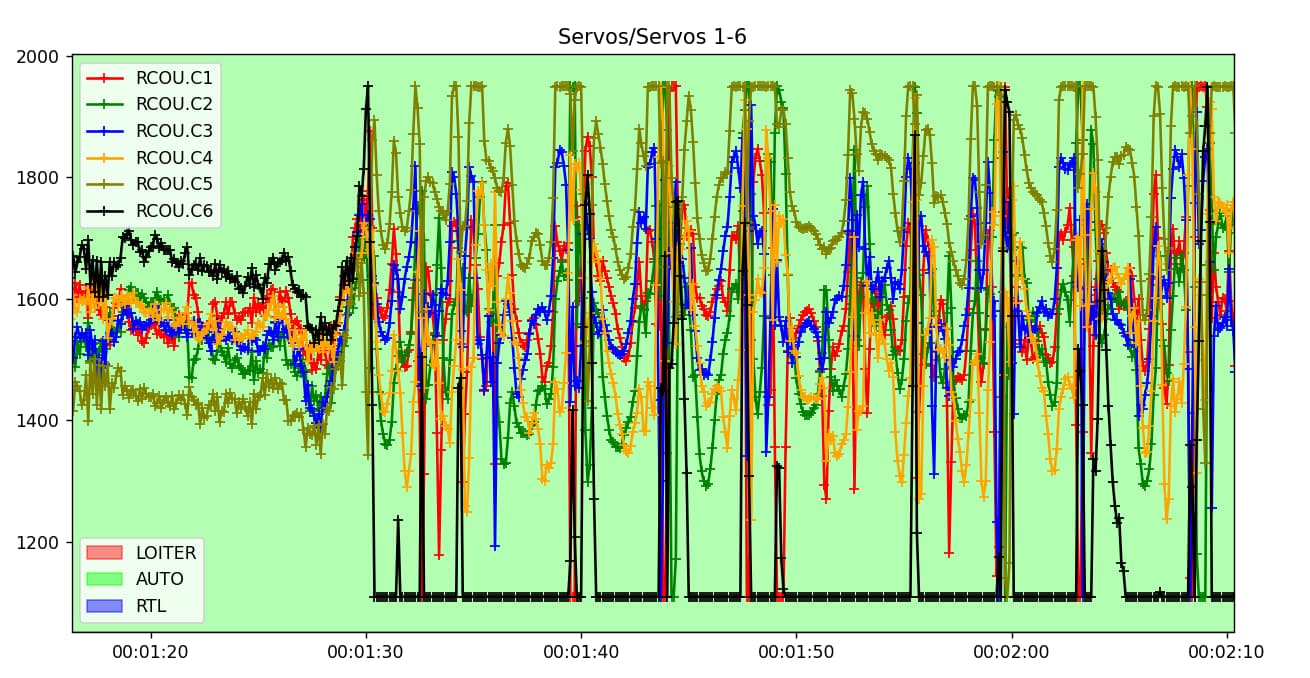
The same moment the quad changed to Alt-hold, several other channels all jumped to some very arbitrary values. To me this looks like an old-school RC failsafe routine. Either way, I’d say this is a radio problem, not an Ardupilot problem. If you describe your radio and hardware set up we might be able to give you more specifics on what to look for.
Yes! exactly, all channels jumped to some values, I have disabled the radio failsafe and flying, as my radio was not giving much range. I am using Skydroid T12 transmitter.
I think this is more of a FC or receiver problem, as when this happens the drone was not connected to Radio, so I don’t know from how somehow receiver jumps all the channel signals to some random values. How can we check whether this signal was given by FC or not?
The graph I plotted was what the FC is seeing from the receiver. Again, the FC did what it was told to do. So I still feel this problem is in the radio setup (I’m including the receiver as part of the radio)
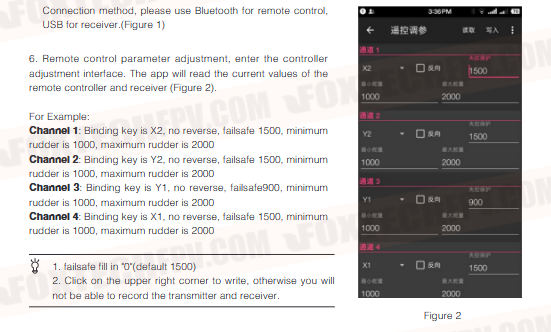
Looking at the T12 manual it looks like you need to set each of the failsafe values. Often those are triggered by the receiver when it has lost signal with the radio. I would have a look at what those are set to.
You might want to do some ground testing to see what the receiver does when it looses the signal from the radio. Generally I would advise against turning off radio failsafes. Some radio systems do not do well when they jump between signal and loss of signal, and back again. Failsafes usually address some of the issues. You might be getting some of the “noise” from that transition between states.
Now it makes sense, I will have a look at the failsafe setting of the receiver.
This Skydroid transmitters are really bad and they have not upgraded anything I guess in last 10 years.
But it is cheap and I have this one for almost 2 years, my receiver antenna wire got broken and I fixed it, checked the continuity and everything, it looks good but giving the worst range (only 400m), I tried to change the antennas also but no luck and I think I need to buy the new .
I will check my setup and share you the screenshot of the settings. But how can I turn off the failsafe?
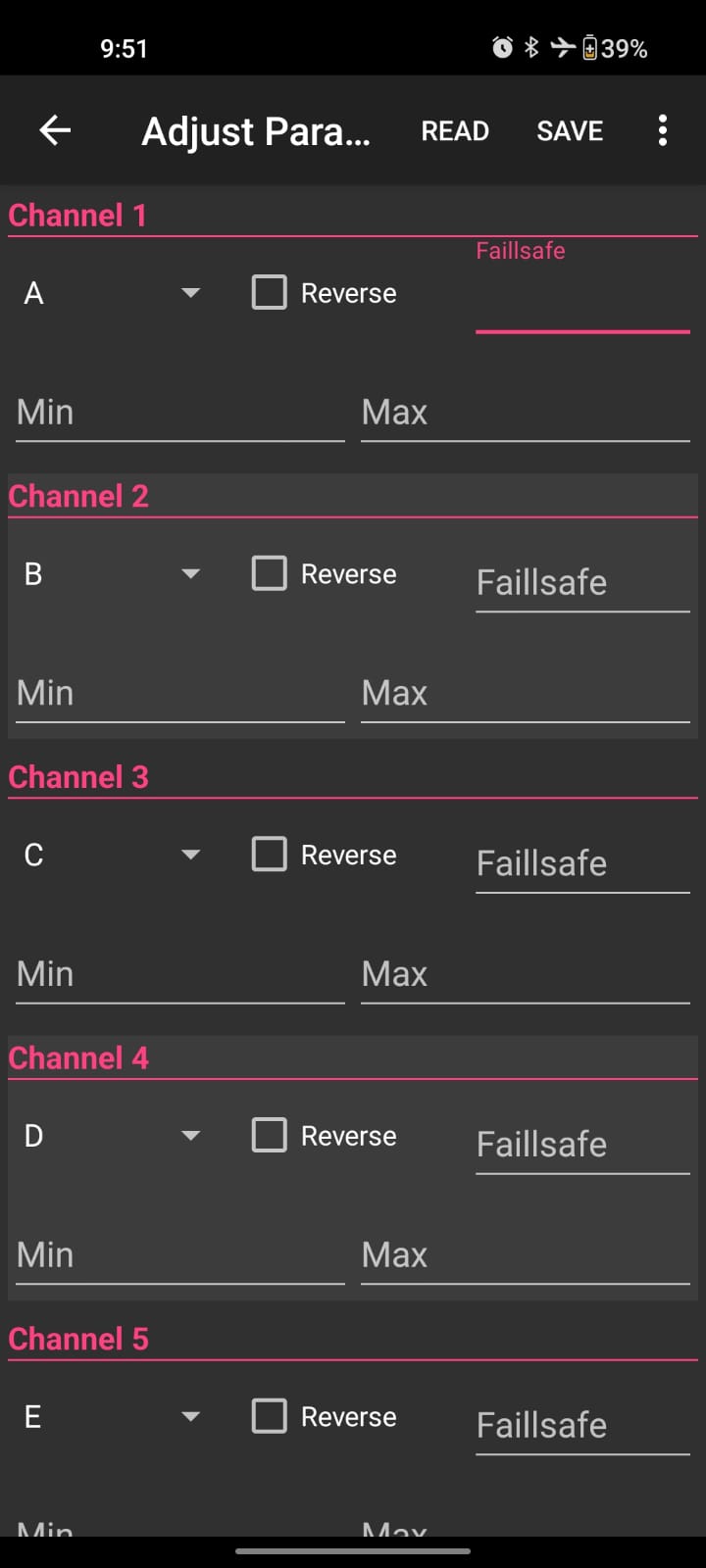
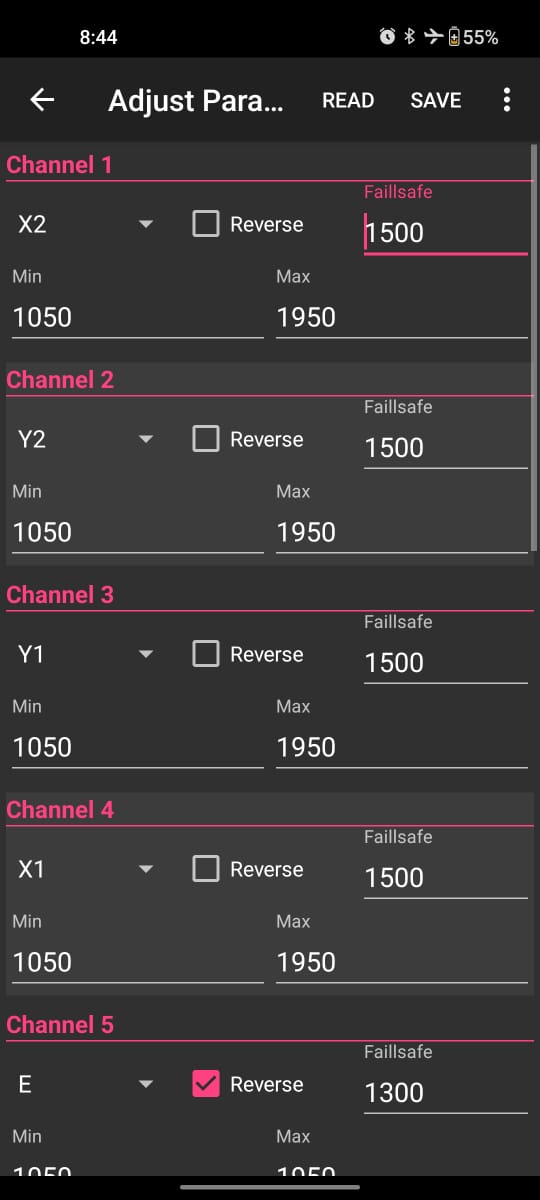
This is the screenshot of setting page, as it is not connected to receiver so it does not shows the values. But I guess there is no option for the failsafe.
Really looking forward to some more insights from you.
It looks like there is a failsafe value to the right of the reverse button of each channel.
If it uses serial protocol like S.Bus it should set failsafe bit, but if it doesn’t you can set failsafe throttle output as low as possible (something like 800us should be good) and configure throttle failsafe.
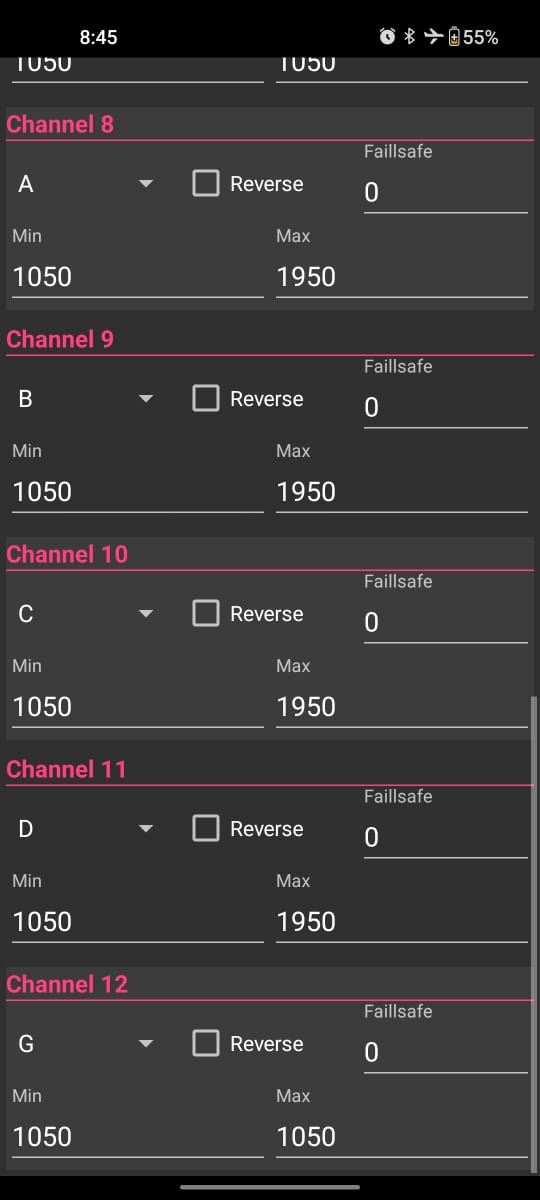
What does this mean? I have already set up the Channel 6 to channel 12 is already set to 0 failsafe value. but in some flights their values also jumping to some random values.
If I keep the throttle failsafe value to 800 then will it not reduce the altitude suddenly or land once the throttle failsafe is ON?
Check what is set for FS_THR_VALUE. I think the default is 950 or 975. If you set the throttle failsafe on your radio to 800 like @LupusTheCanine suggested then if loose radio signal the flight controller will see a value of 800 on the throttle channel and then that will trigger the flight controller to a proper radio failsafe. RTL or Land or however you decide to set it up. Either way, the controller will know the radio has failed and it will react according to your parameters in Arducopter. That is much more predictable and generally considered a safer option.
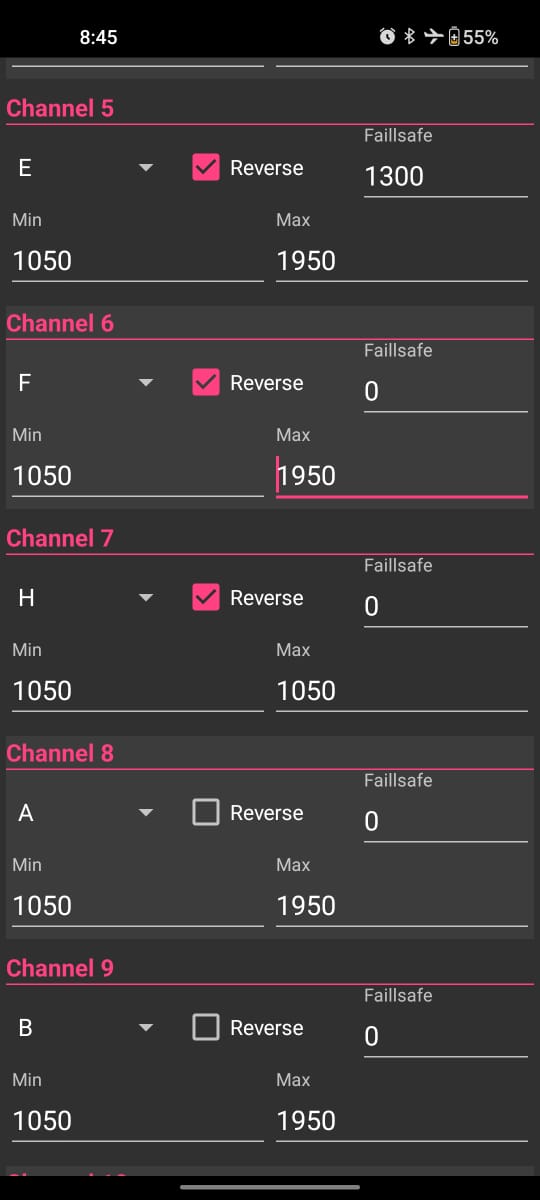
I see in your pictures channel 5’s failsafe is 1300, but reverse is checked. So that would seem reasonable why it went to flight mode 6 based on your parameters.
But in that case Ardupilot radio failsafe works perfectly fine.
As my radio is not giving much range so I want to turn off radio failsafe, I know it is not recommended and safe but I just want to try it to fly fully autonomous.
So for that, what values shall I keep?
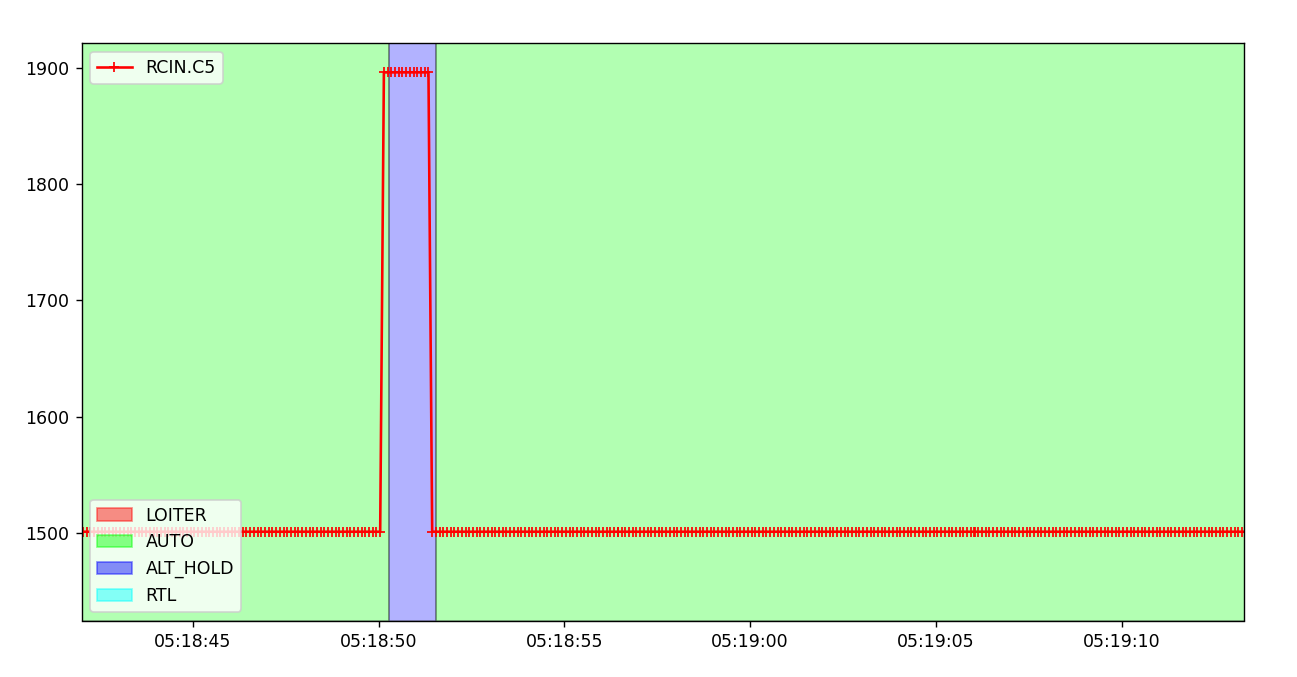
True but in some other flight it went to value of 1900 and channel 1 to channel 4 went to some random values not 1500 in the event of radio failsafe.
Based on what you’re saying I’m not sure what to recommend if the radio is doing “random” things. My only viable suggestion would be to consider looking into a newer radio system that is more reliable. You can get some good ELRS systems for little money, and now ELRS has the ability to do Mavlink it’s a good option.
Thanks @Allister,
Your suggestion are really helpful. I think I will look for some good ELRS system, these Skydroid are the worst I guess.
Just one thing, is there any ELRS system through which I can connect to GCS? The only good thing about skydroid is, I am able to connect to the GCS through bluetooth or USB port of the transmitter.
It would be good if that option is available with the ELRS and how much range do you get usually? my drone is hexacopter around 7kg.
I can have a laptop or tablet connected with my GCS software running. I’m using a Radiomaster TX16S with a Nomad module. I’m using XR4 and DBR4 receivers. But you can use other hardware combinations with the same results.
I’ve seen it work out to about 2 km on stock antennas with low-mid power settings without issue. But with ELRS people are always pushing some crazy ranges so you can get yourself into plenty of trouble.
Ardupilot can be configured to continue mission in AUTO mode if the RC link is lost. It isn’t recommended for safety and liability reasons. I have flown plane missions takeoff to landing where the only interactions between the plane and pilot were arming and setting mode to AUTO before throw.
This is one flight where all channel went to some random stuff during communication lost. Even though the failsafe value for Channel 5 is 1300 but in this flight Channel 5 jumped to 1900 value.
So hard to trust my current radio.
2km in open area? means direct visible link to the drone? what if some building obstruction will come between drone and radio?
And I want your opinion, I have seen few people points the antenna towards up and keep on top of the drone and I generally point towards down and keep under the drone. Which one would be good to maximize the range? as a common sense, keeping it towards down should be better as the transmitter antennas will be pointing up and receiver will be pointing down so connection will be easy but want to know your opinion.
I suspect it’s because you have channel 5 set to reversed.
It’s best to have both antennas mounted on the same plain. Vertical is often considered the best because it doesn’t matter what direction the drone is pointed, if both antennas are vertical they will always be lined up. If you run dual antenna/Diversity, then both antennas mounted at 90 degrees to each other (one vertical, one horizontal, or both diagonal in a V shape) then you have best of both worlds.
Top or bottom depends on the drone, what’s in the way (both on the drone and in the area. Batteries and carbon fiber block signals) How high are you flying? You may need to try out different things to see what works best for you.
All depends on what country you’re in and how strict they are for flying further than you can see the drone. You make your own choices here.
Thanks for the suggestion, Radiomaster TX16S with a Nomad module is really a great option. I am going to try it soon and able to connect with the GCS is what I was looking for. Thanks for the great insights.
Right now, I have tried to fix the receiver antenna and getting some range with my current slow transmitter.
I am changing these failsafe setting as per your suggestion:
Channel 5 failsafe to 0 and unchecking the reverse box.
All channels (from 5 to 12) to zero failsafe so that they don’t switch some random pwm, fingers crossed.
Channel 3 to 975 so that even if I turn off the RC failsafe in ardupilot and if during autonomous mode, this stupid RC switches some random value then chance will be there it might hit the RTL. Well, I will be flying very near to me but flying in Auto is pain as during turns everytime radio failsafe will hit.
Here if you see, the channel 5 switches to 1300 as it was set to 1300 failsafe in RC setting.
But in the other log which I shared above, same channel switched to 1900.
I know it is strange, just want to know whether this somehow makes some sense to you or if you can give me some logic behind changing the PWM by receiver.
The more I see of this radio, the less it makes any sense.
I would test on the ground what setting the failsafe to 0 will do. I won’t recommend turning off failsafes, and I don’t know the behavior of this radio to even predict how it will react.
If you have the RC failsafe set on Ardupilot then if the radio failsafe is triggered Ardupilot will ignore the random outputs form this radio. It might be a pain, but it will be less pain than watching your drone crash.
Thanks I will turn ON the radio failsafe and fly, I will increase the RC failsafe timeout as I getting now around a km range. Just during turns only communication lost.
Today Morning I had a flight and I noticed some other issue, I don’t know whether I should post it here or new thread.
This is the flight log: 2025-04-05 11-26-38.bin - Google Drive
I noticed that drone was suddenly started rotating in yaw axis during auto mission so I put it in loiter and landed safely.
I am unable to find what is the culprit, is it GPS or compass? I have put GPS fallback compass, I can see the heading error increases but not able to understand whether that is GPS heading error or compass heading error.
and any guess what can cause the heading error more? it has never happened before. and if it is GPS heading error then whether it switched to compass heading or not? how can I know that?
Thanks!