Hello everyone,
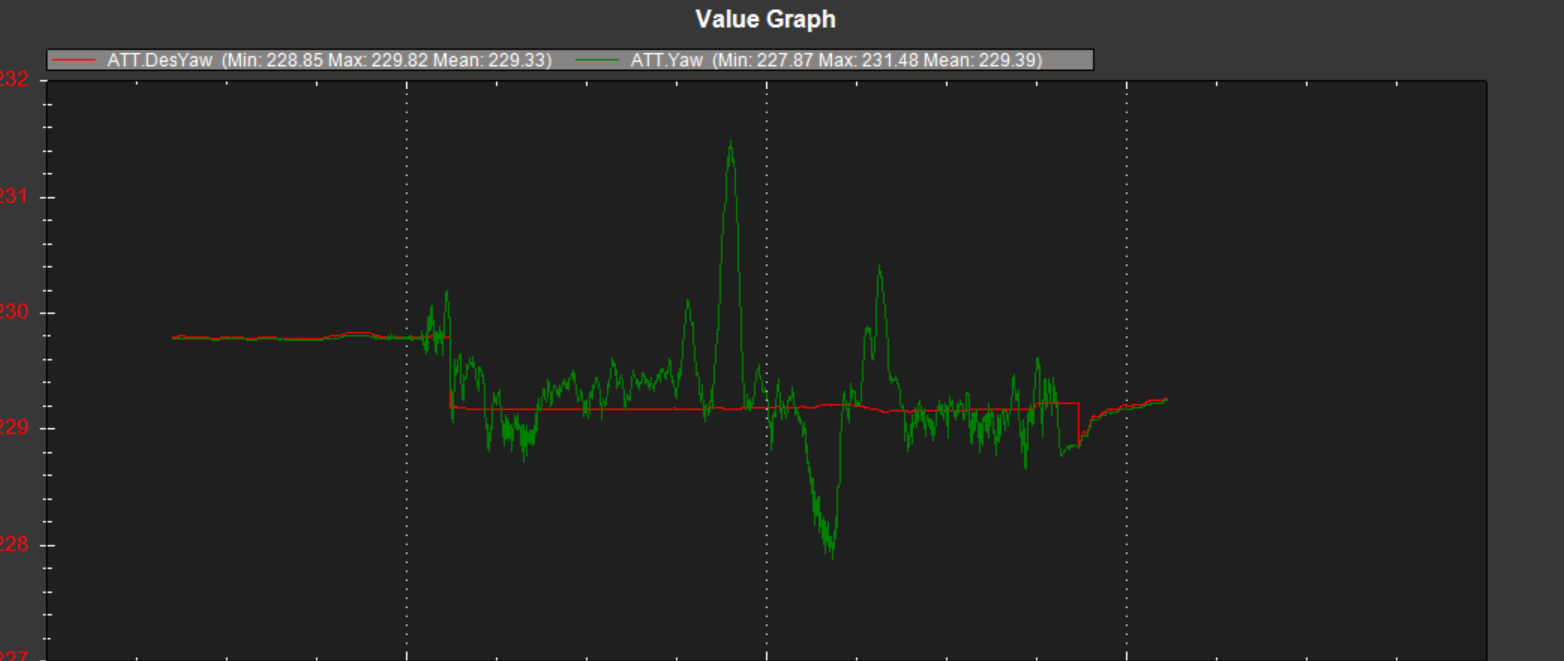
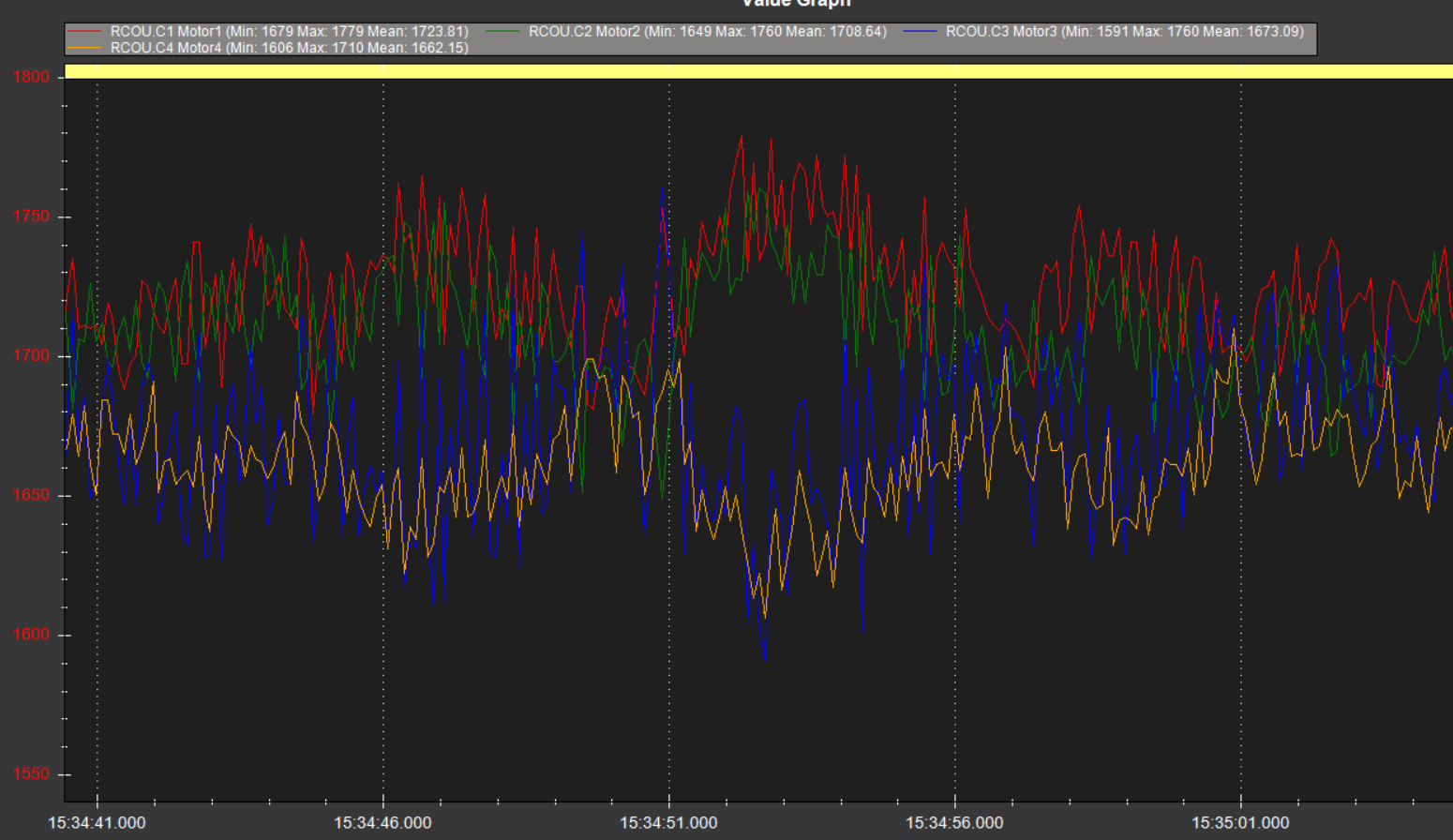
I am using octocopter with AUW of 80Kg. During flight yaw heading is changing & the correcting it frequently. because its their is PWM difference between clockwise & counterclockwise motors without changing Desire YAW.
I have changed compass( HERE3) also but still same issues.
The issue is, as you say yourself, the difference between CW and CCW motors. This is a physical problem caused by twisted motor mounts, or flex in the frame.
The compass and GPS unit has nothing to do with it.
You need to better align the motor mounts, so the props are all spinning on the same plane.