Well the auto-tune took nearly 46 minutes and drained my battery, but it completed successfully. The only thins is when I try to fly it in loiter or stab, it’s quite difficult to control. I’ve auto tuned other rigs many times now and had them all produce a good flying rig. Any idea why this one is different? It’s a 16" quad running on a pixhack v5.
In my experience, too low of PID’s would produce what I’d consider a drunk-like performance.
What was your autotune aggression set to? Lately if I have the aggr below .1, it’s sloppy/drunk. I’ve been playing w/ small copters though, and have been assuming it’s just something w/ small copters.
Anyway, try increasing your pid’s by 25% and see if it’s better/worse. I have been doubling them from the autotune settings, on my little 3" prop copters! No signs of oscillation at double the autotune pid’s.
I think having anything loose on the frame and vibrations could also both lead to autotune being too conservative.
First, I noticed that your copter has a few mechanical quirks which could be affecting control response, and therefore also autotune quality, as autotune has to go with the least common denominator in each axis, so to speak. The fact that autotune took 46 minutes is an indication in itself that it couldn’t reach a good tuning solution.
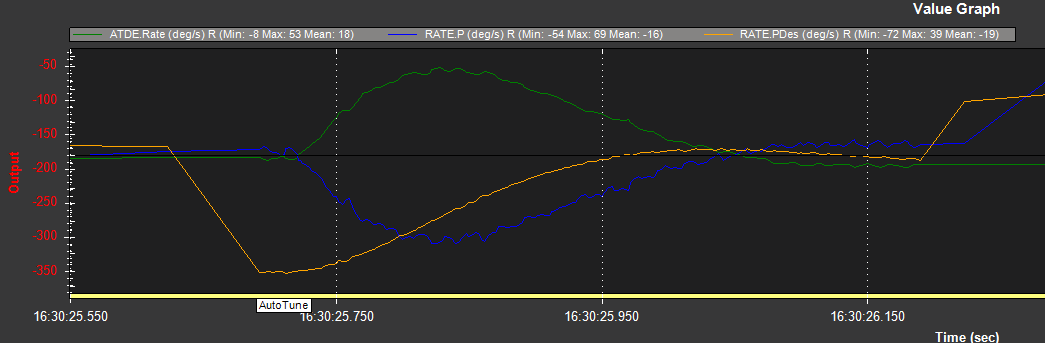
These are rate outputs around the transition from pitch to yaw tuning. According to these outputs, your copter is tail-heavy with a right yaw bias (the outputs should be centered around 0 while hovering). Also, yaw control appears to be very poor, possibly from coupling with pitch and roll.
The yaw bias and coupling probably come from motor misalignment, so it could be an easy fix. The CG issue might be an easy fix, depending on your build (move the battery?). I’d say try fixing these things first - they are easy to verify by looking at a log of rate outputs from a short hover flight.
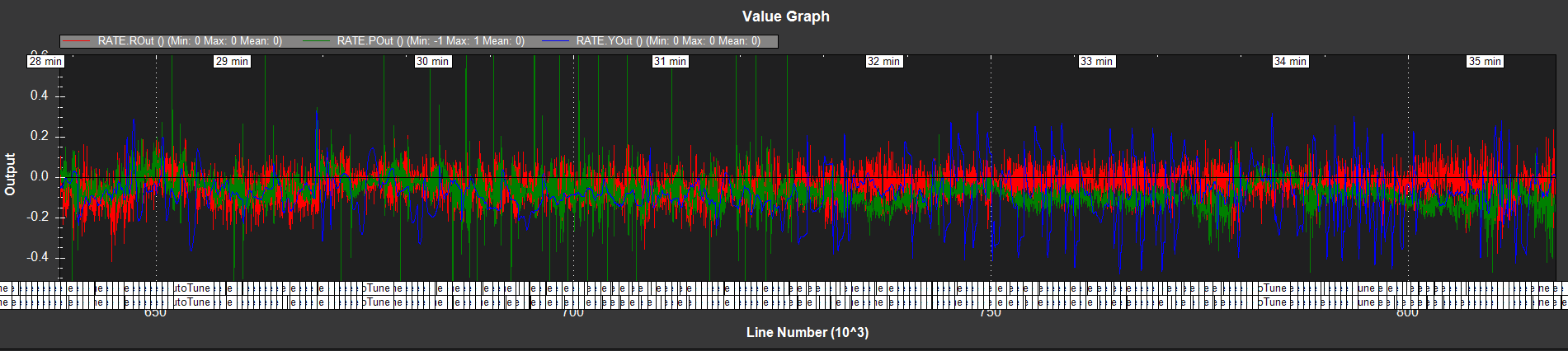
Second, while I didn’t have too much time to really dive into it, I took a quick look at the autotune logs. One thing to note about autotune is that when it performs a “twitch,” it records the IMU readings and controller outputs at full rate, instead of just sampling them. Thus, Autotune is a great way to look closely at what Arducopter is really doing.
This is one pitch twitch towards the end of the pitch axis tuning, zoomed WAY in (look at the time scale).
These are post-filter rate measurements that the rate controller is acting upon. See how it’s all squiggly? That’s bad - something is not being filtered out, and the rate controller (and autotune) is trying to control a noisy signal. We can actually count the peaks to get an idea of what frequency is being problematic. Here, it looks to be something like 60-80 Hz. If you do a test flight with full rate IMU logging and run a FFT analysis on it, you might find a more precise measurement, but we probably have good enough info to act upon.
This brings a few questions to mind:
What is your RPM and blade passage frequency? Is this from propeller buffeting or unbalanced motor/bent motor shafts?
What is your FC mount? Consider different dampers.
Consider playing with the filters, including the notch filter.