Is anyone able to help me understand why our UAV will not always make good line turns while in Auto mode, following a survey line plan. Sometimes it seems to be spot on, other not.
Thanks, that makes sense in theory, but not when you look at the above examples.
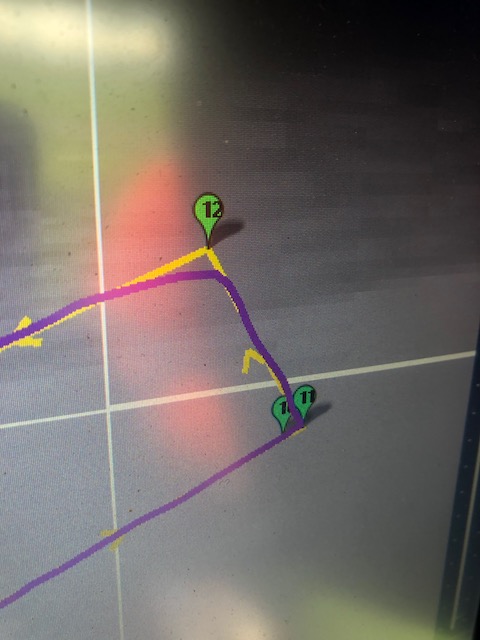
The top image shows the best corner turn made at the end of a long line, when the speed would have been highest. The poorer turn was when it was going slower i would have thought.
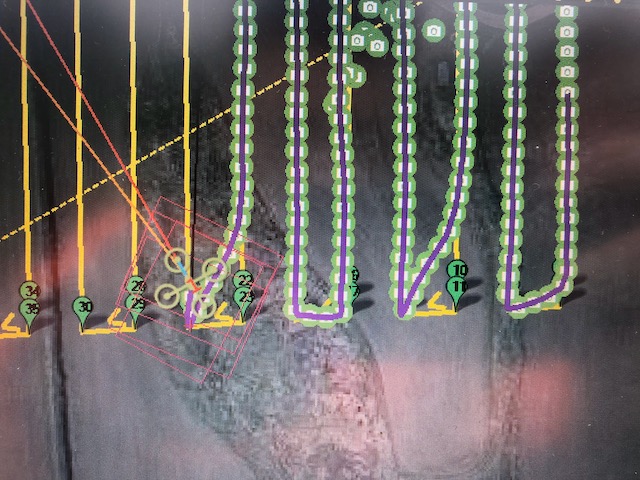
The second image shows some turns to be good, and others not. The aircraft speed would have been nearly the same on all the lines as it reached the end of the line before the turn.
Can you suggest any setting which could be changed to help? Is there a setting that change make the aircraft slow at the corner, so it turns properly?
You can not possibly have been using that setting if you did not applied the PR to a source code repository, recompiled the code, and uploaded the compiled FW into the Copter.
Yes the github.com Pull-request needs to be applied over a source code repository and the source needs to be recompiled and flashed to the board.
This is Not included in 3.6.11. And it is not included in git master. It is a PR.
Are you on windows or on Linux ? There is a lot of documentation on how to compile the ardupilot source code. Google for “how to compile the ardupilot source code”. But I can tell you already it is not simple. It will cost you some hours of work.
What we don’t want is the copter to “stop” “turn” “then go” that is a huge waste of energy.
We need it to use yaw in order to turn and move forward at the same time. A co-ordinated turn
Right now the first turn is fine coming in from a long run, there it does a nice moving co-ordinated turn. But it hits the second WP bang on and stops… then turns…
Try a spline waypoint at the end ofeach leg, central between one leg and the next but further out. The copter should hit the standard waypoints right on, and do a wider coordinated turn through the spline waypoint.