Quadcopter behaving erratic during autonomous flight mission (auto).
At one point the quadcopter stoped in a place without waypoints (it shouldn’t have stop there) and started climbing around 15 meters up, then descended and continued to the next waypoint.
It is having this problem for some time already.
I replaced Pix4 and GPS, with no results.
Firmware is updated from 3.6 to 4.0 without solving the problem.
Everything is calibrated several times, without results.
I’m using Radiolink Pixhawk 4, GPS, radioreceiver R12DS and RC AT10ll.
Attached log and altitude graphics
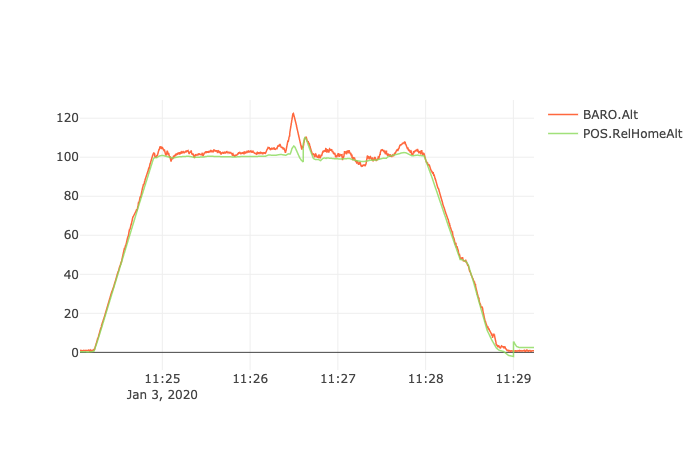
Log attached in a zip file
You will have to provide a link to the .bin log file.They are typically too large to attache.
Hi Dave
Here is the link to the .bin log file: https://drive.google.com/open?id=1mE-f_dd_FeHx1l9wIFG0-8-1lYYuxnxx
Thanks for your help!
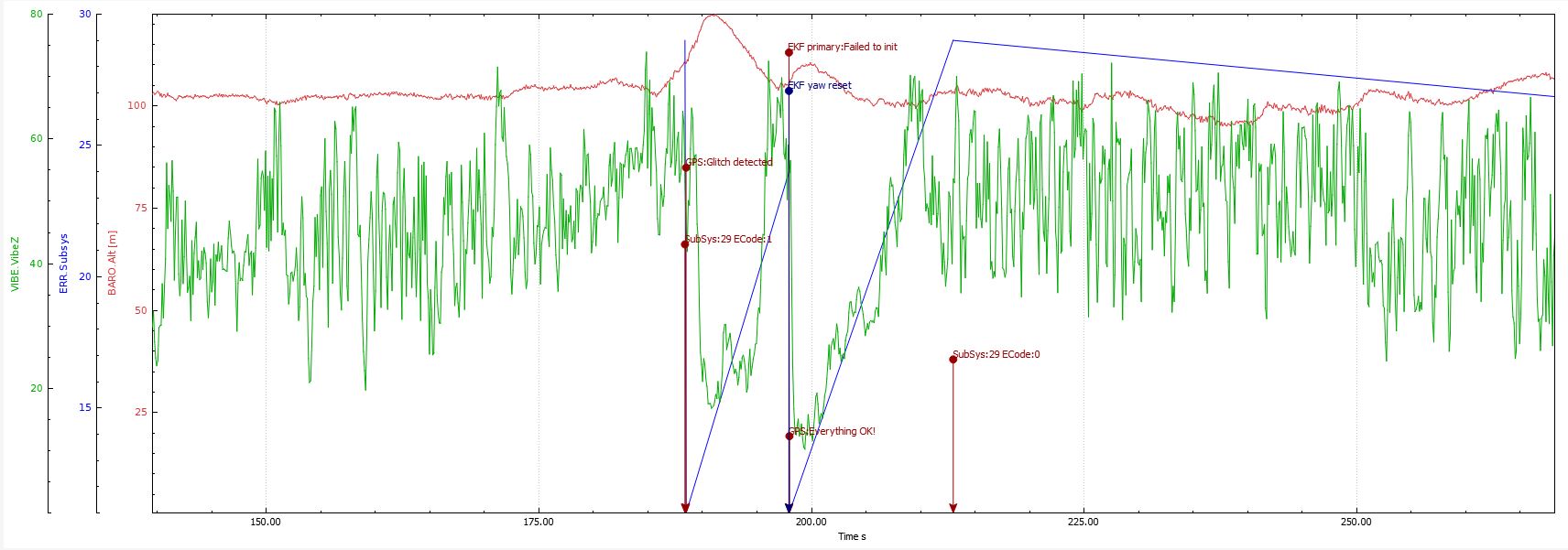
Vibration compensation is enabled (by default in 4.0) and it was triggered from a high vibration event (>70). The result is what would be expected when this FS is triggered. The basic problem is high vibration which should be addressed. Or you can disable the FS but that wouldn’t be the best plan.
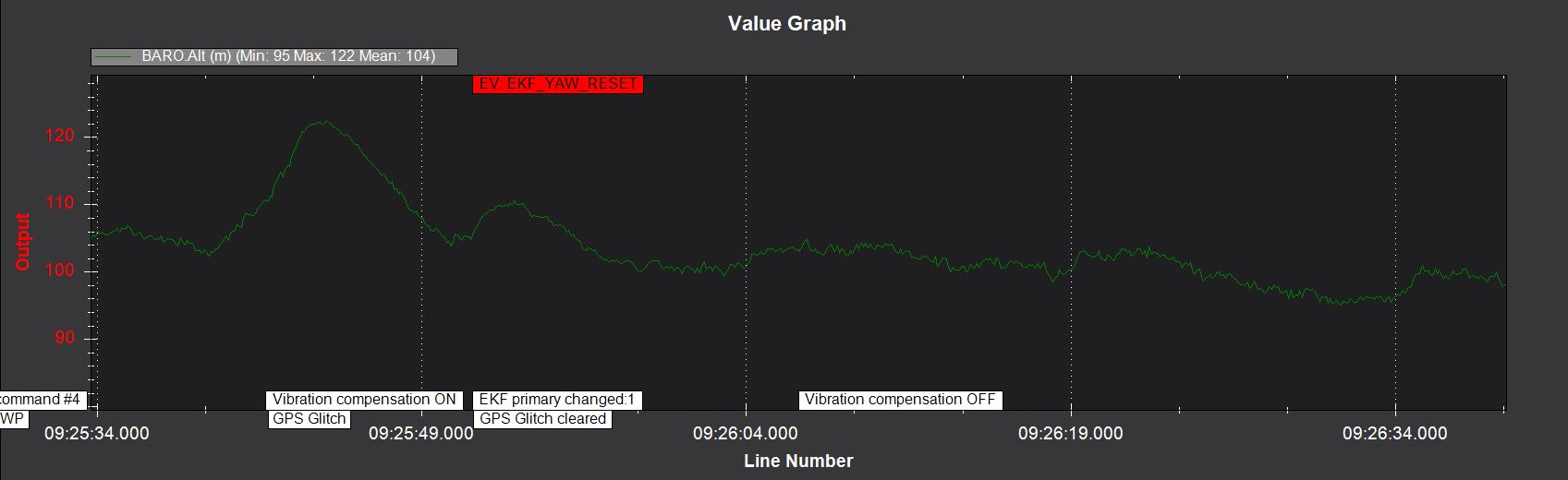
Here you can see the error generated and cleared.
Here you can see the vibration level that caused it and the error code generated.
Read about the feature:
https://ardupilot.org/copter/docs/vibration-failsafe.html
Thanks a lot Dave, after your advice I’m working on dampening the flight control and tightening the chasis.
Best!