well i decided to repair the old girl but its a little worst than i tough 
better off testing with this plane than some off my other ones that are waiting for there maidens


It’s not all bad. I’ve had several planes over the years that have flown better after they suffer a rapid unplanned disassembly.
1 Like
@yak-54 I’m following this thread very closely as auto-landing is very important to me. thanks for your contributions.
Repairs on the way
this time its hardwood with bit ply top and bottom cross-grained next time it will break the fuse in half lol


ok started to change some prams
max sink rate from 2ms to 1.5ms
set the waypoint radius to 10m from 40m
set do land start before waypoint 10 and set it to 30m
( will it jump up when it hits do land start or only if i abort ) ?
and set auto bank level to 30% from 40%
forgive my ignorance, as I’m very new to arduplane and don’t know what I’m talking about… but, I feel like the auto landing parameters are secondary. first, I think it’s more important to set TECS parameters correctly. they are what actually fly the plane. and autotune. then, if need be, adjust some landing settings.
regardless, looking forward to your results - video video video!
There is no altitude to DO_LAND_START. If you only have one DO_LAND_START command in your mission then the lat/long don’t matter either. The plane will fly to the WP right after the command.
I’ve noticed in Mission Planner that if you don’t have a plane connected then sometimes the DO_LAND_START command doesn’t show up correctly (or at all) in the flight plan. It seems the software defaults to generic commands (and possibly Copter commands) when a plane isn’t connected.
Hi buddy it does fly nice in auto follows ways points keeps its Hight
found this video as well

sorry mate. popcorn is popping, looking forward to the movie!
Damn. Sorry to see that.
that is more than what i said
anyway is it normal for the rudder output in auto tune
green is the rudder output ?
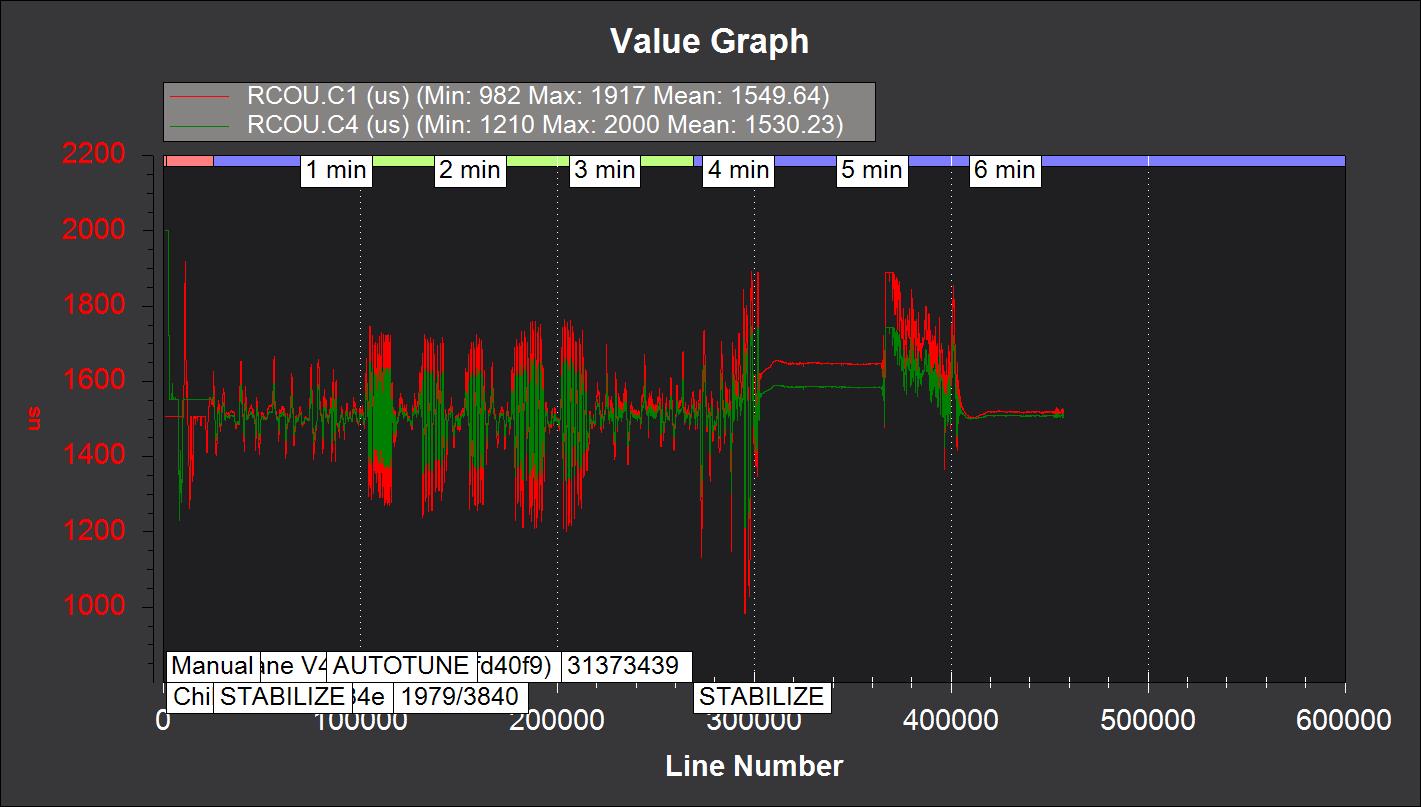
Auto tune in plane only does pitch and roll.
i cant work out why it was outputting rudder when i was doing auto tune there was no rc input from the radio ?
and in the osd it was saying it was in autotune when switched to Stabilize to land
I think I was typing before thinking.
Autotune will fly the plane like FBWA so it will try to coordinate any roll inputs as it normally would based on KFF_RDDRMIX. So yes, you should see a rudder output during rolls in autotune. That’s normal. It won’t tune them, but it will move the rudder.
I’m not sure why the OSD was giving you the wrong mode.
Here is a video on landing crabbing and no wind
I’m guessing you’ve looked at all the low hanging fruit already: Battery, GPS, FC moved.
Some random questions because I don’t have quick answer: After the rebuild did you perform a calibration of the accelerometers? Did you have to move any of the wires near the GPS? Did you use any of the differential thrust settings?
Here’s a real long shot from what I saw in the video: Did you have the flaps set up as flaperons? And is the flap on the right sitting lower than the flap on the left?
Do you have the log for these flights?
yes battery was where it was when i put it in cube was still fixed down
i do have flaperons setup but not used and not set to auto there on a switch
when i was looking after the mishap at the where they are siting before i picked it up the right one was up and the left was down that was because the plane was not sitting even and still in Stabilize
i did center all the trims and servo centers after the rebuild
and the logs are missing the first 2 flights i will plug in the cube later on tonight get the other logs
to hot in the shed 42C ( 107.4 F ) today