There is no problem during hovering.
At the end of roll and pitch, the aircraft drops in altitude.
I raised the throttle, but my quad smashed hard on the ground and climbed again.
The same problem occurred in Stab mode as well as Loiter flight mode.
I hadn’t had this problem before modifying the pid.
This is the first problem that occurred after pid modification.
What caused this?
Can the altitude of the aircraft go down because of the pid?
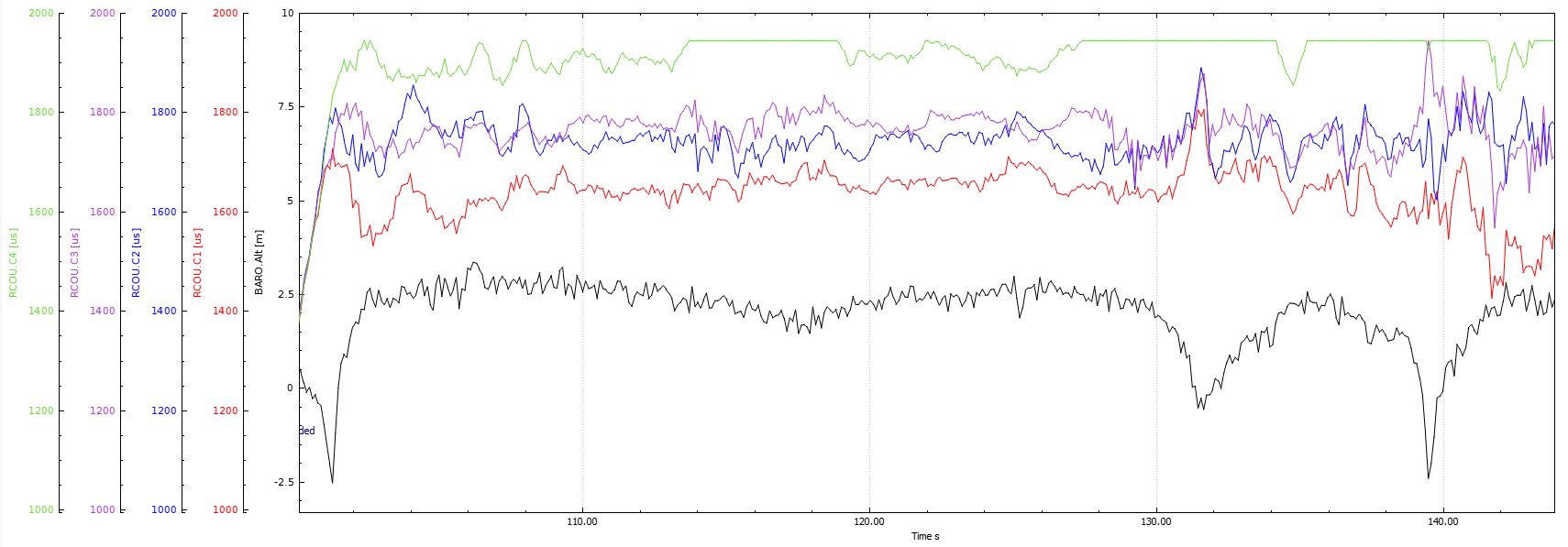
This craft is struggling just to Hover and motor imbalance is terrible. I doubt it has anything to do with PID;'s. And why are you running such an old version of Arducopter?