I disable;
- ARMING_CHECK
- GPS_TYPE
- there is no Fence.
- I try stabilized mode.
- I disabled SERIAL3 PROTOCOL
- I need to arm the drone via RC. still cant arm the drone. Any idea how to solve this issue.
![]()
I disable;
- ARMING_CHECK
- GPS_TYPE
![]()
What Flight controller are you using?
Have you calibrated your RC?
Have you tried to follow the configurator?
sorry I forget to mention
and will write here again.
I use Ublox M8N GPS module.
So assuming Flight Controller does not have a compass,This compass belongs to GPS right.
I did calibrate it but still same error.

I remove the GPS completely and I get this error
It is a closed Hardware, you may also like to contact them for better support. Do they have this “Safety” configuration?
thank you I just reset parameters and it worked. Thus can you suggest me a alternative (“open”) board
I cannot recommend an alternative “open” hardware. We use Cubepilot most. The most popular are Cubepilot, CUAV, and Holybro. the thing to note is lately, Holybro and CUAV have brought the power monitor to I2C/DroneCAN, in my view should be more accurate than analog where wire resistance is an issue. Is on my next buy list. It also depends on your budget.
You do not need an open board.
What you need is to not use QGroundControl and use MethodicConfigurator/QUICKSTART.md at master · ArduPilot/MethodicConfigurator · GitHub instead.
It only uses two software:
Once configuration and tuning is completed you can switch to QGroundControl again and never look at AMC and MP again.
Thank you I think I need to follow your guide. Because drone is not taking off.
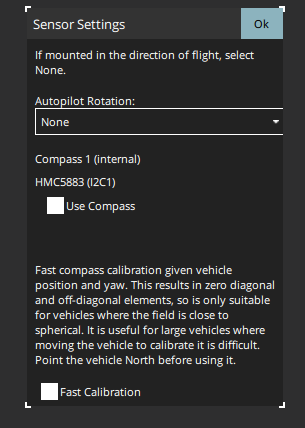
This is weird. I use mission planner. Just go to compass tab remove compass 1 2 3. bingo