The wiki says that it is possible for a copter to work in Loiter mode without GPS, using only Optical Flow, can someone confirm that this is true? I followed the guide, here is my config:
EK3_SRC1_VELXY=5
EK3_SRC1_POSXY=0
In status Tab I can see that the pilot is “aware” of optical flow data opt_m_x/y are changing
And I removed GPS from pre-arm checks
The optical flow data is received from onboard computer
But I can’t arm - “Arm: need position estimate”, what does that message mean? Do I need GPS or maybe I missed something, or maybe it wants something else?
You need to tell the FC where it is by setting EKF origin. Otherwise the drone won’t know where it was and therefore won’t be able to tell where it is.
Hi @Boop ! You need to set the origin to have a reference to your starting point to calculate local position information without GPS. You can use Lua script to do the same: AHRS Set Origin
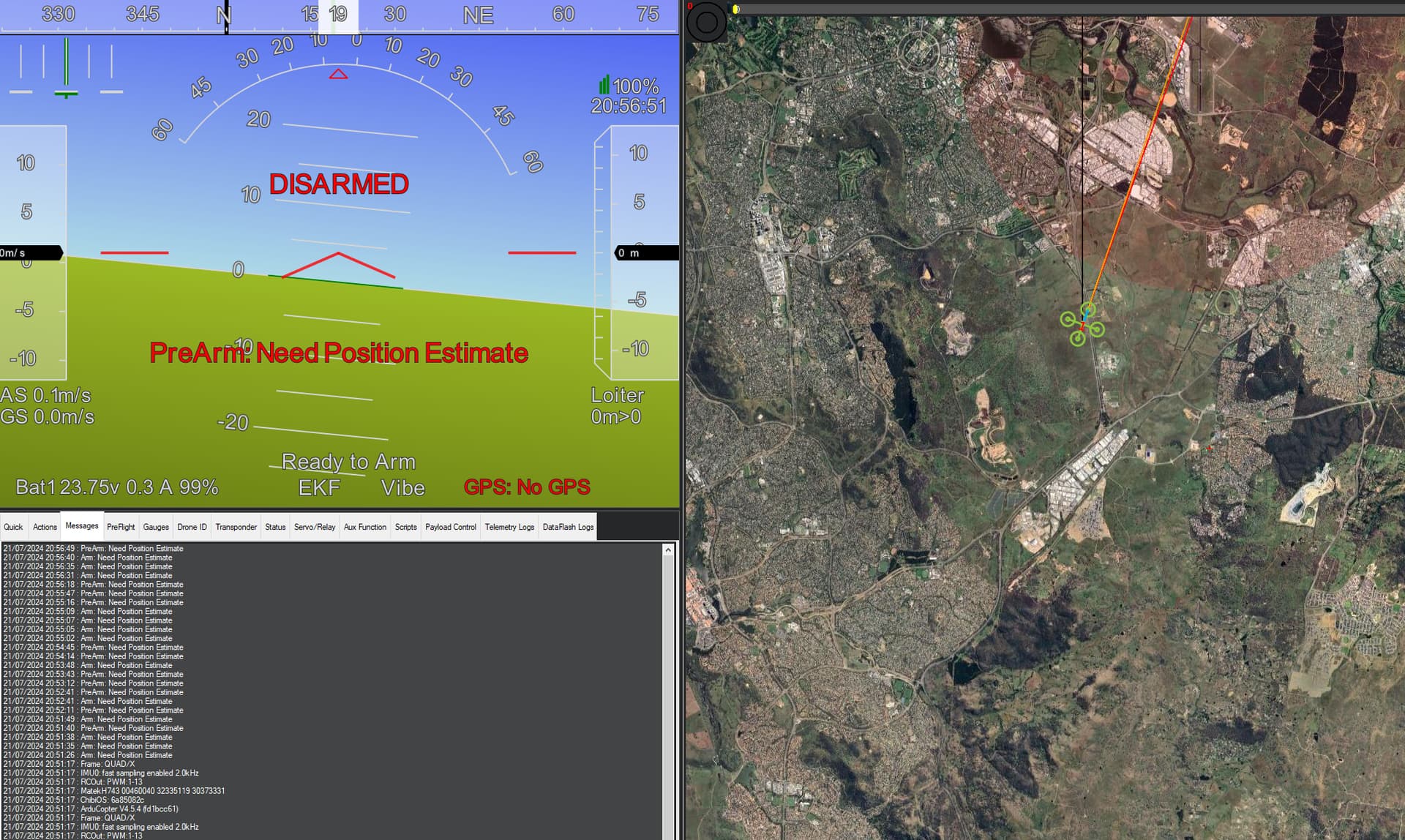
@snktshrma@LupusTheCanine Sorry, I was to quick to make judgement. The error is still the same, it’s just that now it says “ready to arm” and before that it was sayng “not ready to arm”. So I set EKF origin and the error is still there, here is the screenshot
Another note: I do not have rangefinder. Is it possible to just use barometer and send flow data from onboard computer or is it mandatory to have rangefindere?
Hi @Boop! You need a rangefinder in order for velocity estimation to work properly, though you can use flowhold mode alternatively but is less stable: FlowHold Mode — Copter documentation
If you want to send position and/or velocity data from an onboard computer, you can use external nav as ekf source.