I have a large Octo Quad X. 25KG 27" props.
It has been flown several times without issue. However, historic flights were relatively gentle and had calm wind conditions.
Yesterday, I took the aircraft in moderate wind for a WP mission (simple survey grid) flight. All was okay at first, but I was getting a lot of EKF lane changes. I could see that altitude was unstable, and it was wondering a few meters.
Switched into Auto and aircraft started the mission. Just before WP3, ending leg 1, I got FS Vibration compensation on message. The aircraft then started to oscillate violently in pitch. I honestly thought that is was going to flip over.
Arducopter then managed to stabilise the aircraft, and FS Vibration compensation was switched off. I managed to fly home calmly and land.
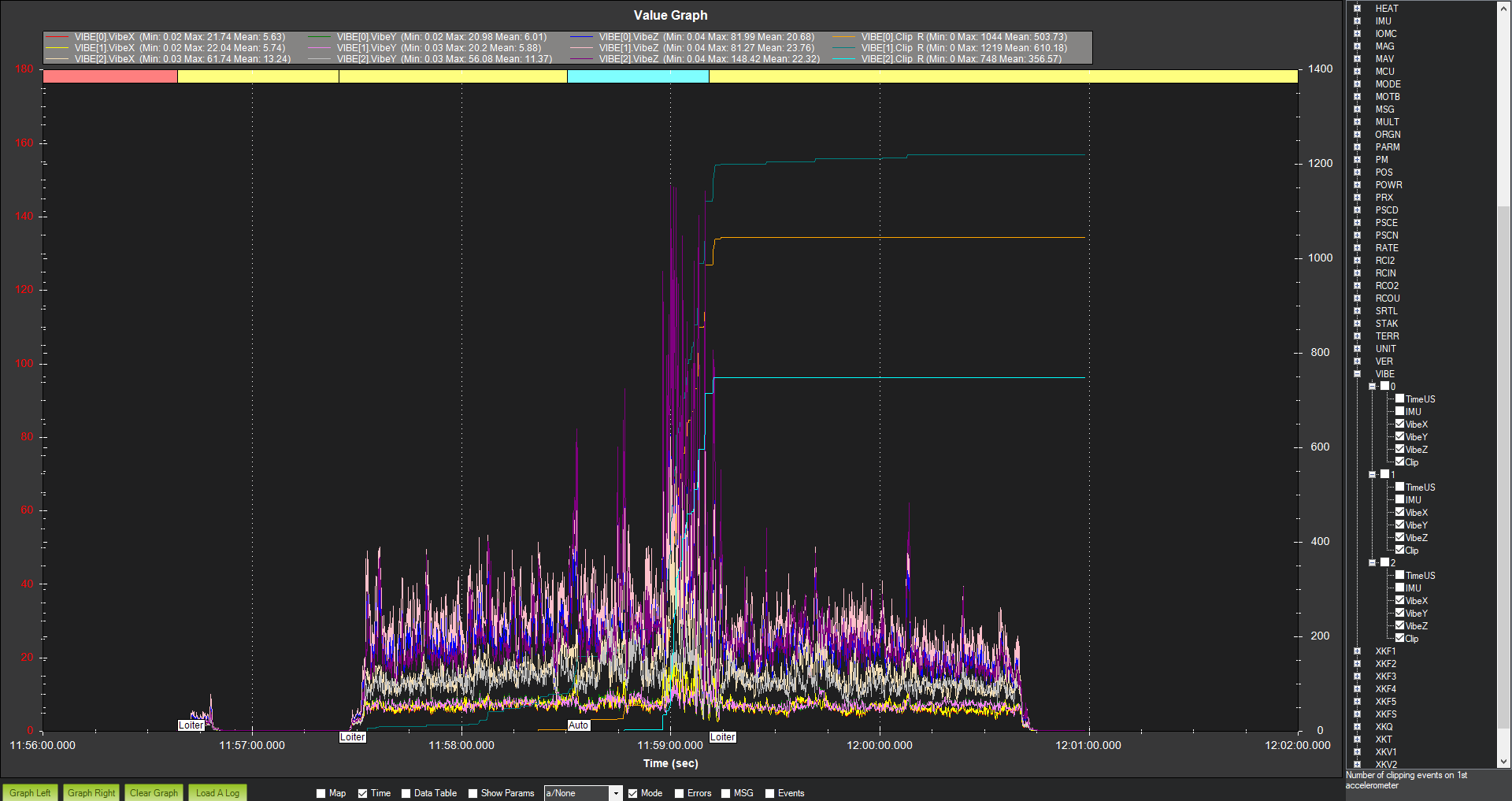
I am looking at and trying to understand the flight log; I think there is a switch between Baro 0 and 1, but I am not sure.
Could this be the lane switch?
Are these issues all vibration-related? Have I messed up the dynamic filtering, or was it badly tuned?
I am still trying to learn how to read flight logs.
Your PSC_ACCZ_P and PSC_ACCZ_I don’t match MOT_THST_HOVER and ATC_THR_MIX_MAN isn’t set. This should have been done after the first test flight
You are missing IMU temp cal
You are missing the MagFit (compass motor calibration) flight
Have a look at the How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide and do all the steps youd didn’t do so far. Download the .zip folder with the param files from the guide, edit each file to suit your copter and upload them one by one as you read along. The guide tells you what to do and which file is needed at any given time. Do not skip any steps! Anything that might seem like a shortcut will result in a worse tuned copter in the end.
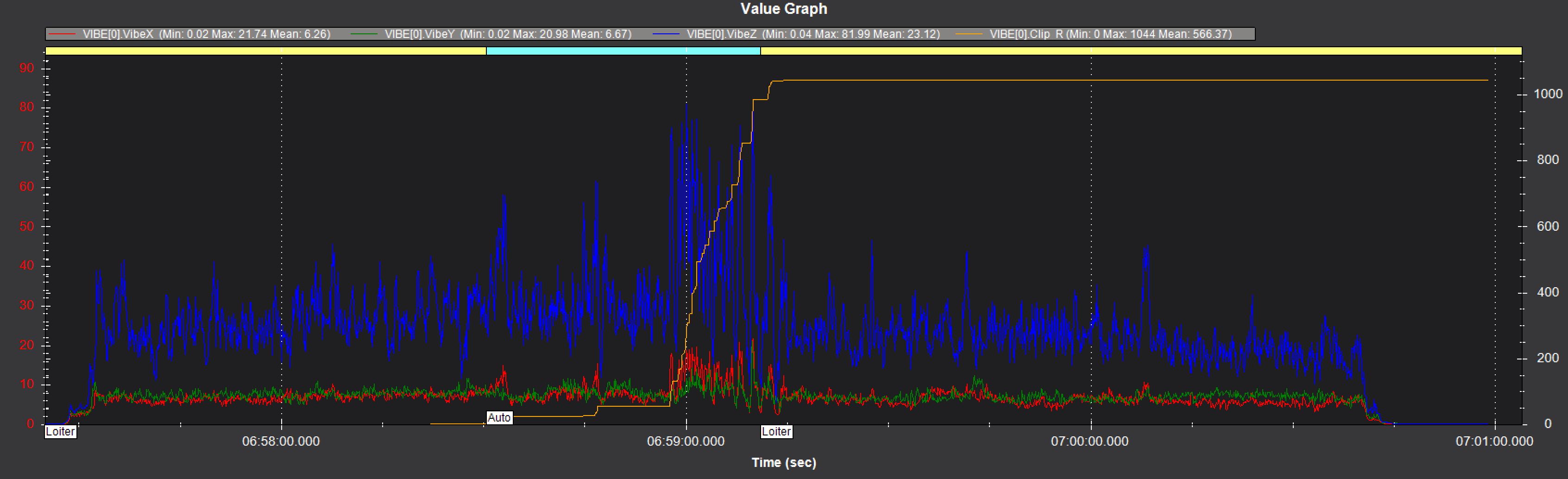
Reducing vibrations is your first priority right now, I can not emphasize it enough.
Wow, I didn’t realise they were so bad. I was plotting the wrong data. I just used the drop down, VIB_ACC to plot IMU_ACC Y and Z.
There is no way auto-tune can properly tune this aircraft like that.
Thank so much for the link:- How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide.
And thank you both for the speedy reply.
I will add a vibration plate and start from scratch.