")
My long-held dream of an autopilot weighing less than 100 grams has become a reality with the introduction of the AIO FC. The small size and light weight of the aircraft provides safety, economy, and more flight opportunities, and facilitates the cycle of learning and practicing autopilot operation with the actual aircraft.
Other than the AIO FC, the aircraft is composed of inexpensive general-purpose parts, none of which are made by a 3D printer. Parts are readily available and easy to repair in case of malfunction. This makes it easy for anyone to get started and keep going.
It can be connected to QGroundControl and Mission Planner for setup, mission creation, and log analysis, and it would also be possible to develop apps and manage the aircraft through MAVLink.
I always thought that the price of the aircraft and the lack of flying sites was one of the disincentives to learning ArduPilot. Furthermore, in Japan, registration and remote ID will be required for aircraft weighing 100g or more from June 20, 2022, making it difficult for ordinary drone flyers and engineers.
Under such circumstances, I think this ArduWhoop will come in handy.
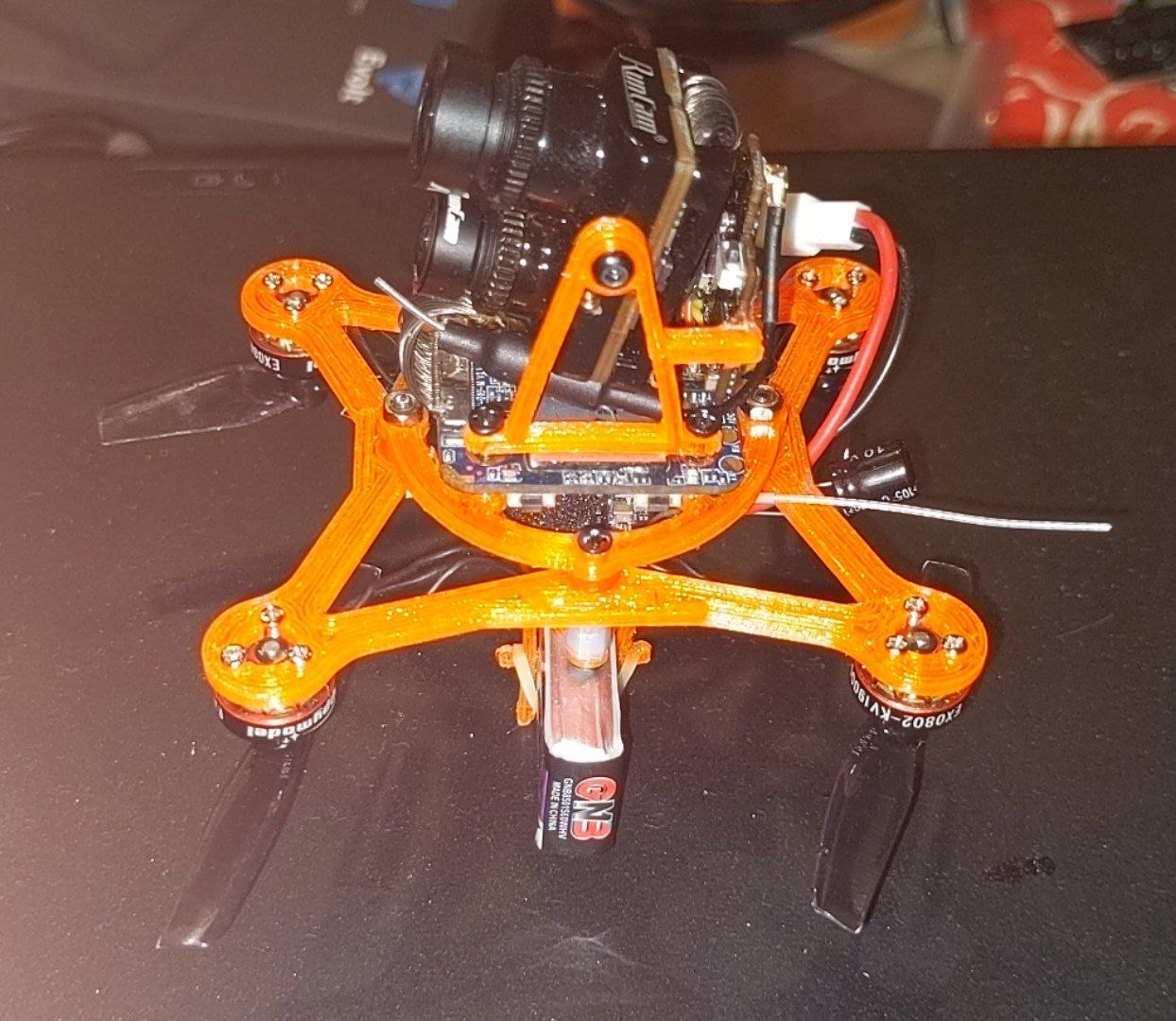
Right now, it is not equipped with VTX and camera. However, I think it is possible to mount them at less than 100g, even including changing the type of battery. Depending on the intended use, the mounting can be interchangeable. Next, I am interested in indoor flight with optical flow.
The aircraft quickly acquire 13-14 GPS, but the accuracy is poor, the aircraft often drifts in Loiter, and the difference between the RTL landing site and home is 3-5m.
I think I need to find a better location for the GPS and noise reduction.
Thanks to ArduPilot community for the great job. Thanks.
Configuration:
- Firmware :ArduCopter V4.3.0-dev
- FC Board :Flywoo GOKU GN745 40A AIO BL_32 V1.2
- Motor :URUAV 1102 10000KV
- Propeller :Emax AVAN Micro 2inch 2035 4 blade propeller
- RC Reciever/Transmitter :AC200/Futaba 10J
- GPS :GOKU GM8 MINI V2.0 GPS w/ Compass
- Telemetry radio :ESP-WROOM-02
- GCS :QGC from TAJISOFT
Precautions:
- I used STM32CubeProgrammer for the firmware flash because Betaflight Configurator did not work.
- I followed these steps to complete the initial tuning. I used 5" values because 2" ones are not listed.