For a long time I have been looking for a small cheap development drone. A few months Back I saw another blog post about about someone who had managed to make a tiny whoop run Ardupilot. From the moment I saw the post and the associated video I knew I wanted one of my own.
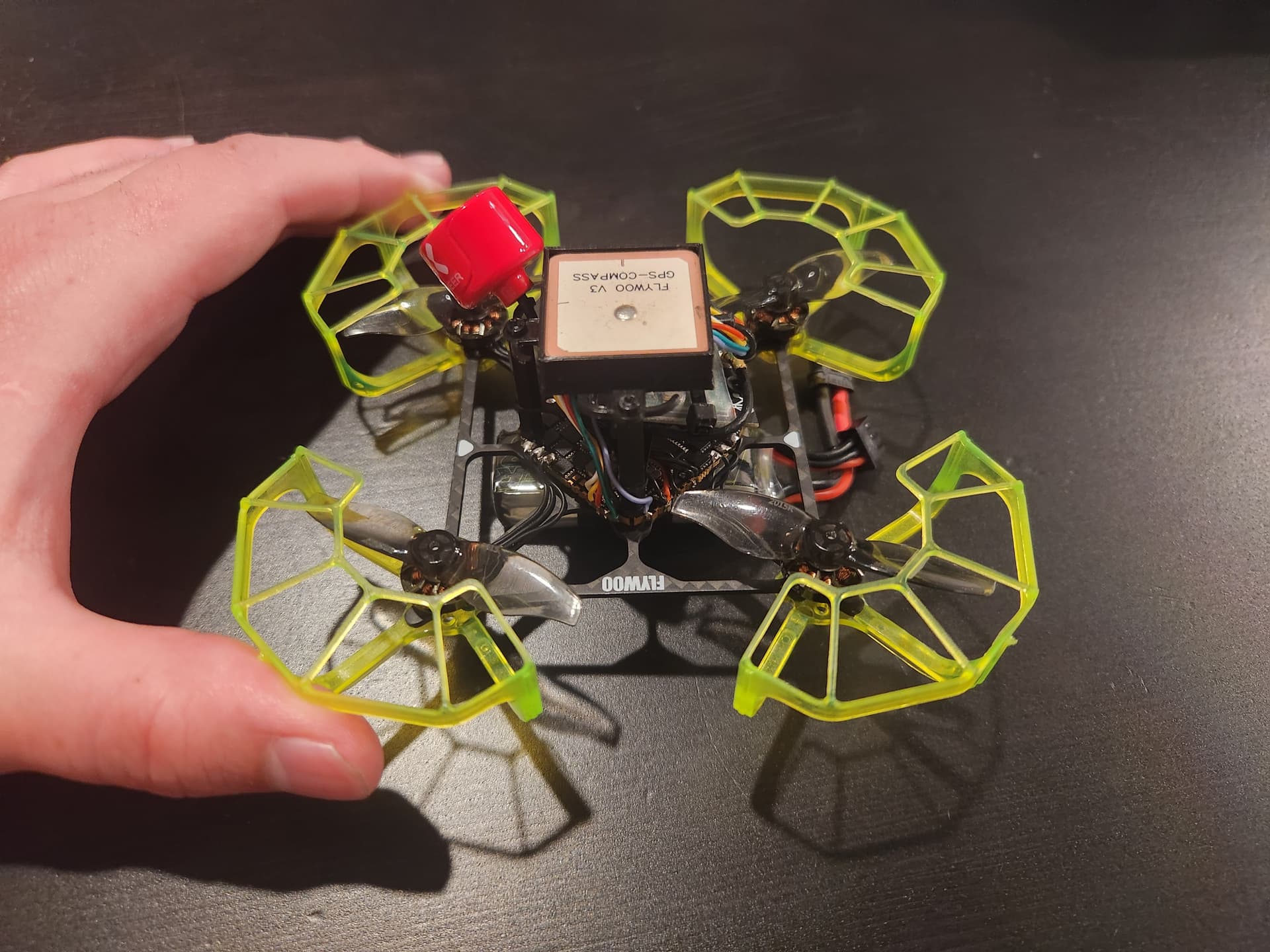
I just completed my tiny whoop project. I used a tiny whoop frame from FLywoo, Flywoo’s GN745 flight controller, Flywoo’s GM8 GPS and MRO’s sik radio. The really cool thing about the GN745 is that it is a 30x30 mm flight controller that can run ardupilot and has a built in 4in1 ESC. I have also been impressed with the MRO sik radio. I have go about 200m of range with the lolipop antenna I am using.
I built a Shen-based (TerraPlane) Cinewhoop for similar reasons, though it isn’t quite the budget solution that you’ve achieved here. Glad to see AP flying on something even smaller and more accessible!
Great build and stable flights. I’m happy that you and I are interested in the same exciting thing.
BTW, I could not find an RC receiver in the parts list.
So you intend to use a joystick via telemetry radio for manual control like stabilize mode?
If so, how do you connect the smartphone, joystick and telemetry radio (ground side)?
It flies pretty much well, but easily hits its own propwash when descending, so one has to fly quite quickly. The maximum range I could obtain with it so far is 1km, but it is definitely capable of more…
I am not using a dedicated RC receiver. to save weight I decided to use the mavlink joystick function in QGC. I purchased a micro usb to usb c cable which allowed me to plug in the sik radio to the phone. From there I bluetoothed the xbox one controller to the phone and setup up the joystick in the QGC android app. You can also do a similar setup with a laptop too.
That looks really cool! I have an engineering background already but am completely new to drones and ArduPilot. I was planning on undertaking my own ArduWhoop project soon and was hoping to use a 360 LiDAR and bottom facing rangefinder for autonomous indoor navigation, but I’m starting out by doing as much research as possible before I commit to buying anything.
If I didn’t have a GPS, and did RC over MAVLink like @sprained_ankle, do you think I could make that work?
My current belief is that, probably, for saving some weight you will get better result with conventional RC using tiny efficient chips like ELRS, and with some scripting enabled to start missions from an RC.
I am not totally sure as well that good enough lidars and rangefinders will fit what one can call a whoop. I had some experience with that 3901 Matek flow/rangefinder sensor, which is lightweight enough to fly on a whoop, but its performance was really unacceptable (it goes up to 2 meters I believe, which is easily exceeded even indoors). Some proper rangefinders already have weight comparable to a whoop itself. But probably I have not searched enough…
That’s really handy to know, from what I’ve read over the last few days it seems like I would be better off one size up, maybe 5" instead of 2". Conveniently, there was a comment on @sprained_ankle’s YT video linked above from someone who had achieved “incredible” position holding with LiDAR on a 5" sub 200g Ardupilot drone with 15 min flight time, so I’ll probably start looking in that direction
I have been looking at potentially doing another arduwhoop build specifically for indoor use. I was thinking that for telemetry I would use one of the tiny esp32s in substitution for the sik radio since wifi should be good enough for indoor.
I have a hereflow from a previous build and I remember the flow hold being pretty good, but the lidar only worked to about a meter outside, but indoors it should be a bit better.
the main problem I am having with using a flow sensor is that most of them use CAN for IO, but the GN745 doesn’t have a CAN interface. I was wondering if it might be possible to use the SLCAN driver and a SLCAN transceiver to use a can sensor over one of the serial ports? @rmackay9 do you happen to know of anyways to use a CAN sensor on a board that doesn’t natively support CAN?
I don’t think it’s easy to do CAN over serial … for can peripherals I think the CPU needs to support CAN natively. If CAN isn’t an option then I think one of the serial flow sensors would be a better idea… e.g the Cheerson, MatekSys or UPflow.