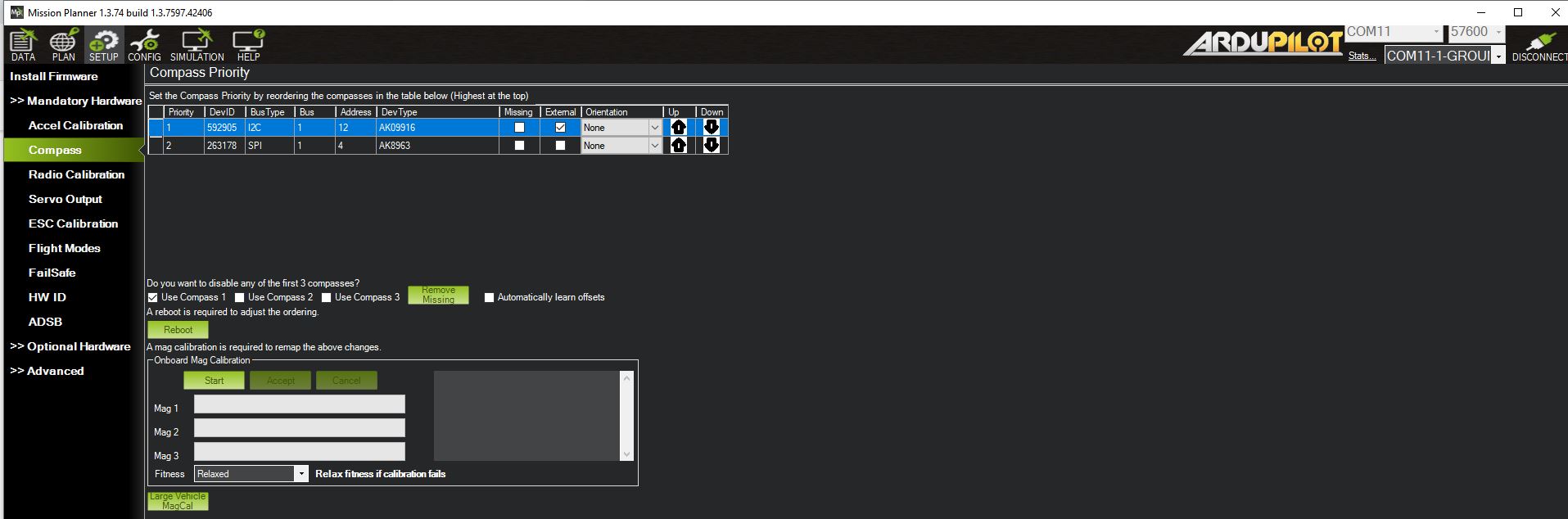
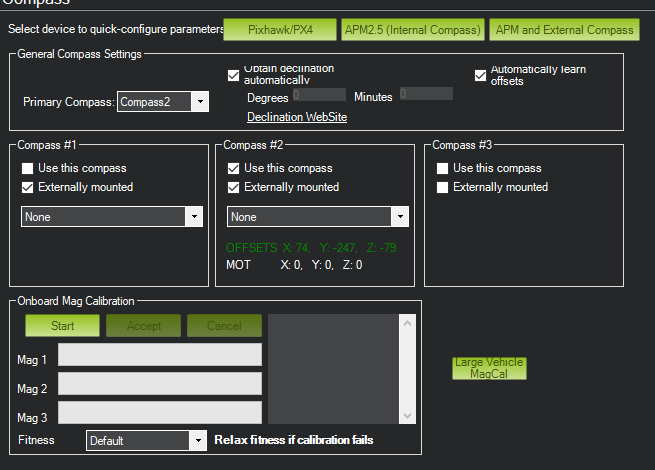
So I have been using a pixhawk 2.4.8 with ardurover 4.10 dev, and so far i have some issues like bad lidar health popping up if I dont sent distnace sensor data in less than 0.5 seconds, to the pixhawk just randomly losing calibration on the compass which im sure is hardware issue, but now I am looking at the guides again and the interfaces are different, in the guides and the simulation I have a “set the compass priority by reordering in the table below” while in my pixhawk all I have is 3 compasses and boxes like use this compass and thats it, ardurover in simulation is the same one as my board. Anyone knows why is this different? also on the simulation I have more parameters, in fact if I try to import the parameters of my pixhawk to the simulation I get that its missing 191 or so parameters…
Hello, I checked , i am ussing the same mission planner software, the pixhawk board shows that is running 4.10-dev but it shows like this: when trying to install the newest firmware it just says that the firmware is already on the board.
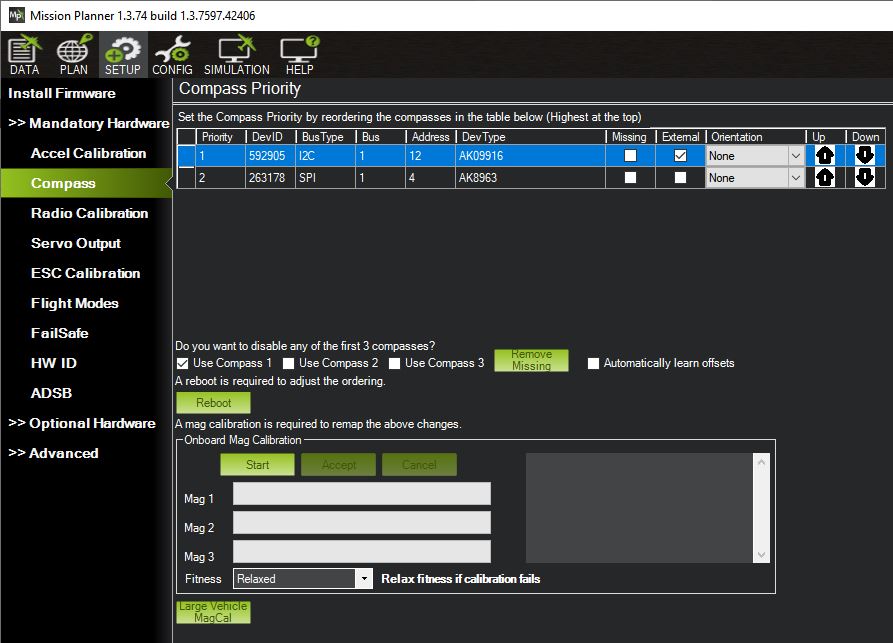
this is the same mission planner software, it shows both interfaces, the one you showed for simulation, and the other one for when I am connected to the pixhawk.
This is why I am confused, in my mission planner if I am connected to a simulation, it shows that interface, but the moment I connect to my own pixhawk it shows the other interface. and not only that but in the parameter lists there are a lot less parameters than in the simulation.
Nevermind , fixed it Somehow even though it was reporting ardurover 4.1.0 several times, I was able to force install the firmware and it worked. now it kind of work, what I will now try to find is why the FAILSAFE message is always on or if there is a way to disable disarming the pixhawk if the proximity sensor fails. Thank you!
 when trying to install the newest firmware it just says that the firmware is already on the board.
when trying to install the newest firmware it just says that the firmware is already on the board.