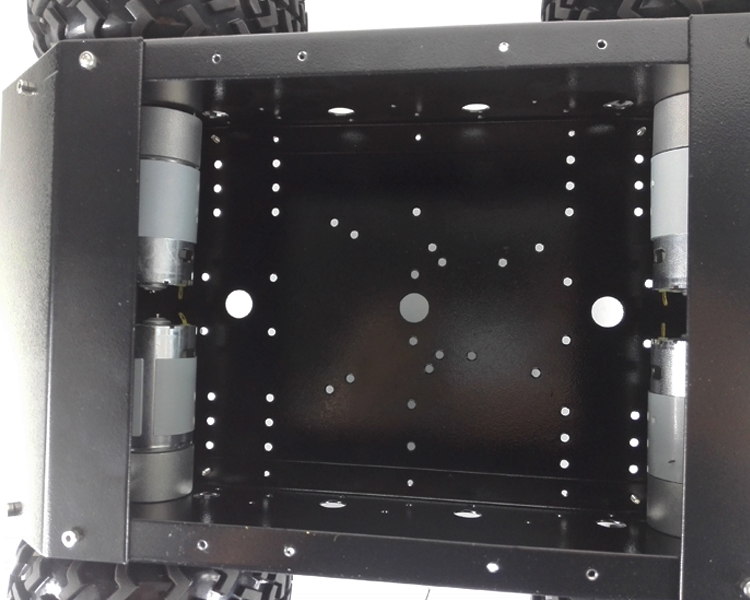
Hi,I’m going to start a smart car project,as shown below, four 550 motors ontrol four wheels,my hardware is pixhawk ardurover 3.2,need to achieve skid sterinng turn,Whether the front and rear wheels on both sides have the same speed, How can I connect 4 motors,with four ESC or two ESC.
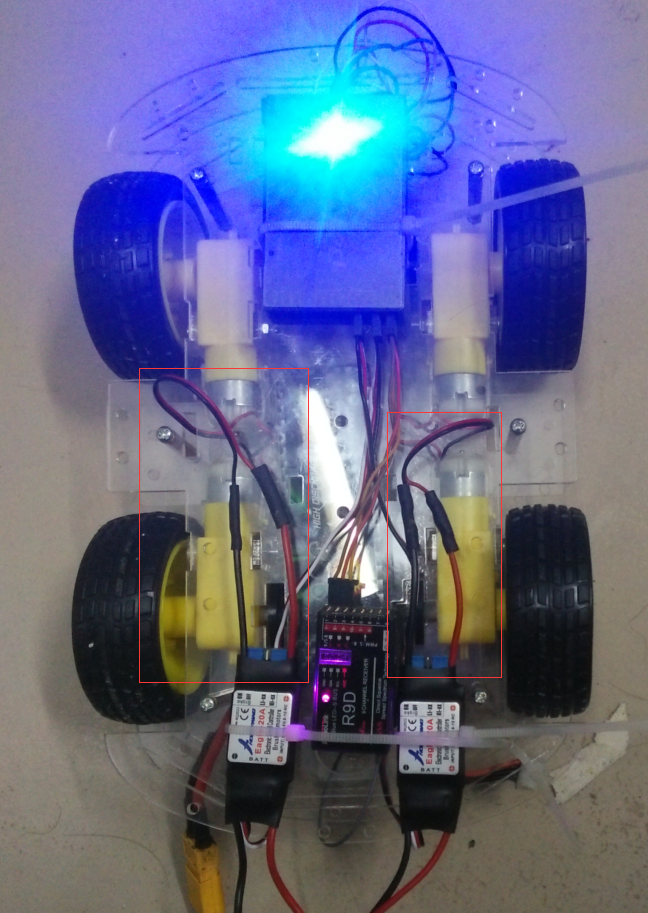
This is my former rover using pixhack and audurover3.01. It looks very compact.
I parallel the motors on each side, they don’t have much current so I can do this. For your rover, I suggest using four ESC , parallel PWM input on each side and then connect to pixhawk.
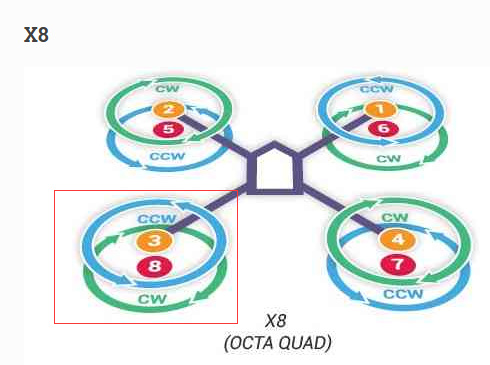
BTW, It’s similar to this. The motor on this picture need same speed. Your can try this.
Sorry not reply you in time, I recently busy with another project.
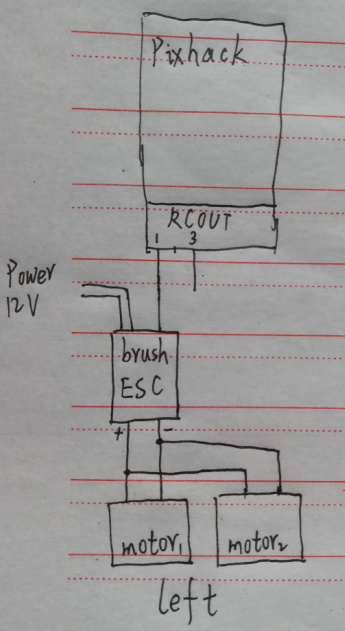
Now about your question, I draw a simple diagram to explain. This is the left side. Right side is similar.