Hello.
I’m currently occountered with an issue that in FBWA mode when I increase throttle the levator starts change its value in the case the plane is without gps.
Can anyone help me disable this functionality?
it’s a feature, not a bug  given you’ve set up everything correctly, that is. speed-height-control has tight interactions of throttle / pitch. additionally we do use speed scaling of control surface gains, this will be based on throttle output as long as we don’t have a proper airspeed (estimate).
given you’ve set up everything correctly, that is. speed-height-control has tight interactions of throttle / pitch. additionally we do use speed scaling of control surface gains, this will be based on throttle output as long as we don’t have a proper airspeed (estimate).
check https://github.com/tridge/ardupilot/blob/b81930885ccf43edae7371bdbe44c741baded3b0/ArduPlane/Attitude.cpp#L40 for eference
throttle-dependent movement of control surfaces should be noticeable in assisted modes + when soft armed only. if you do see them in manual mode while disarmed, you‘ll might have to check your transmitter for undesired mixes.
in case you’re unsure if what you’re seeing is expected behaviour, post a log for us to look at.
1 Like
Thanks for detailed answer. That was very helpful to anderstand the problem.
I will be very thankful if you can help me to figure out what can I do to achive below described behavior.
The scenario I want to use the plane, is flying without any sensor attached to it. Start flying simply by pushing the plane into the air and then control it manually. If I changing min and max airspeed values to 0 (default values are 9 and 22 m/s), the unwanted change of pitch angle disappears and it behaves as expected.
Also that happens while disarmed as well as at the time it is armed. I tried with different transmitters and the problem persists.
Currently I’m continue to study codes, also I’ll post a log file a little later, maybe it will helpful.
Thanks.
when retrieving a log showing your issue, remember to set LOG_DISARMED = 1. make sure you‘re in manual mode and only move your throttle stick fully up and down slowly. repeat in FBWA. this will show if there is any unwanted mixing happening in your setup.
Hello again 
I did as you said. At first for disarmed state I moved throttle stick up and down at manual mode and then at FBWA, then I did the same for armed state. Please check the attached log file.
I make a zip archive for attaching to this message.
2021-05-25 21-22-53.zip (850.9 KB)
what you posted is a telemetry log from your GCS, not an onboard dataflash log. based on the contained information i can’t spot any unintentional RC mixing active or other unexpected behaviour.
maybe check TECS (Total Energy Control System) for Speed and Height Tuning Guide — Plane documentation (ardupilot.org) for more info on speed / height - controller interactions.
1 Like
Hi @vierfuffzig,
thank you for a link, that is very useful information for me, it seems I need more time to study documentation and understand how everything works.
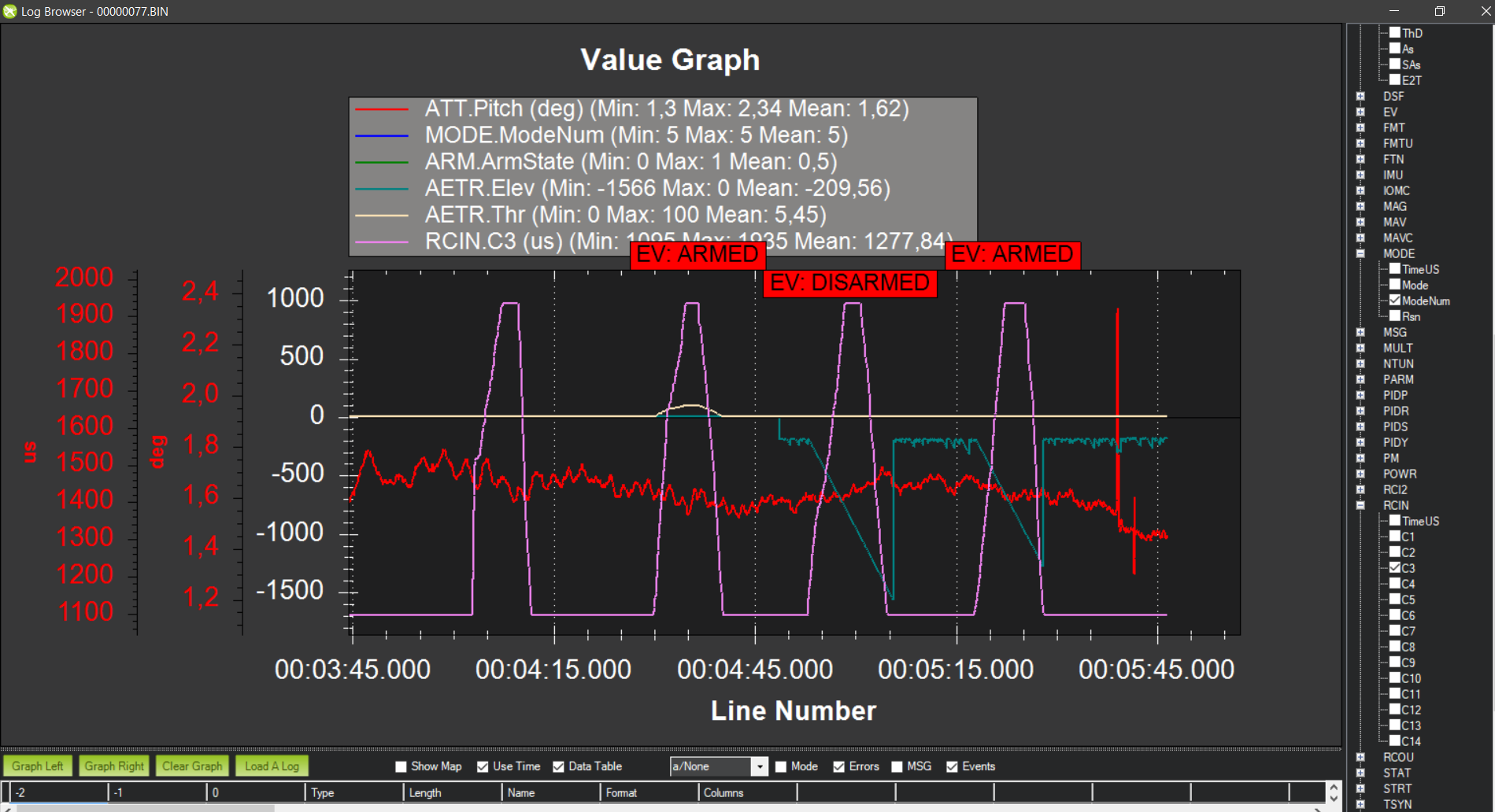
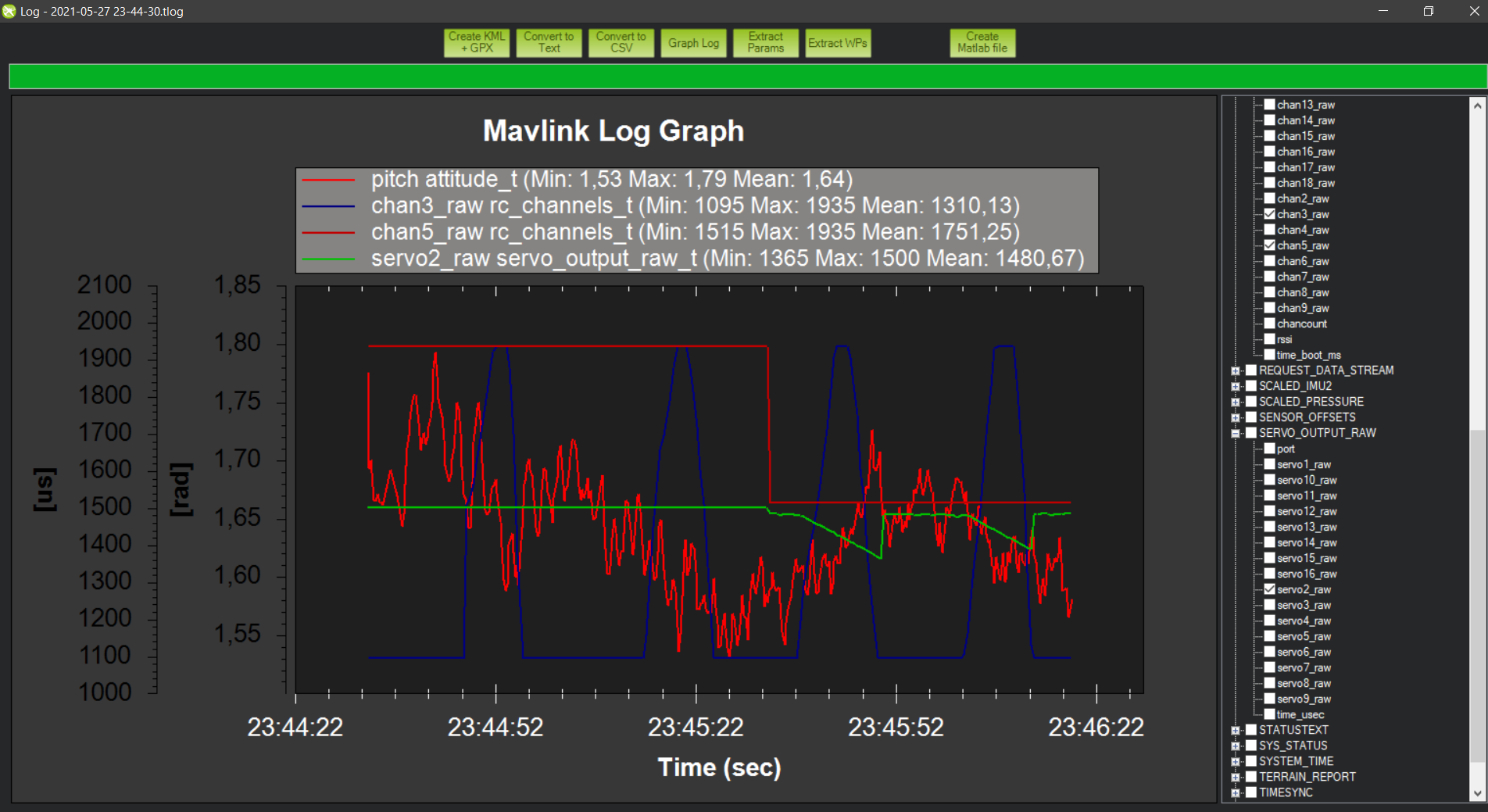
I didn’t worked on this for a time, and now, after studiing graphs of parameters I see that dataflash and telemetry logs from GCS have the same behavior.
https://drive.google.com/drive/folders/1H9LRuWTr1g6ylKtl22z8rE1z_jB06y3H?usp=sharing