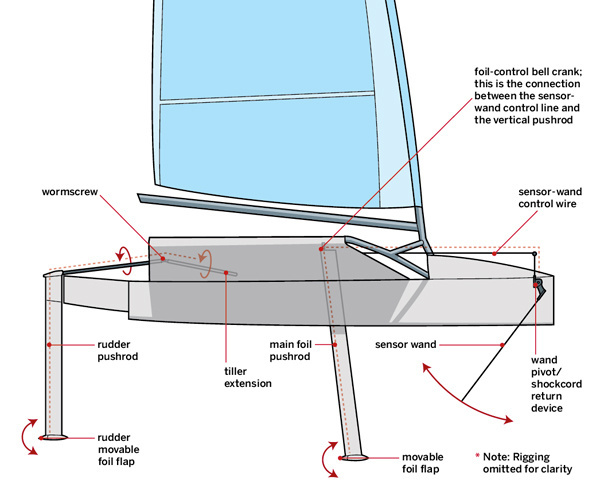
My purpose in investigating flight controlers was to replace mecanical links which make foil adjustments during sailing for an International Moth hydrofoiler (sketch attached).
The required task is just to adjust “altitude” or Flight level above the water.
ArduPilot is so complex that I don’t know where to start from.
Can anybody provides a basic workpaper reference dor airplane which could be useful for hydrofoil purpose as above mentionned.
This looks like a cool project. Some years ago, I contemplated something related, to try to control a model multihull using an IMU sensor . Here is some info on the boat, (I didnt start the project, since this was long before IMU’s were available at reasonable size and cost) http://www.zoomworks.org/oldsite/Kwiki/uber_frame.htm.
To my mind, the nearest software to this would be Arduplane. The rudder foil is similar to an aircraft elevator. I would ignore attempting to adjust the foil on the daggerboard at least to begin with.
As a first step, you could try loading ArduPlane onto a Ardupilot FC ( like pixhawk etc) and then attach an elevator servo so you have a visible actuator and then observe how it responds in relation to the boat, maybe just in displacement mode to start with
You have perfectly understand what I want to do, To use a big servo + Li-ion batteries
At the moment the sailors do not trim the elevator very often, they just decrease lift when going downwind, because speed increases, and lift increases too but at speed^2
The wand-sensor basicaly trim the heigh above the water, by changing the lift of the main foil.
I feel confident that with such Softwares and Hardwares I have just discored yesterday, It will be possible to consider other target like minimizing global induced drag by splitting the lift between main foil and rudder foil. Also height or pitch adjustments could be done with both foils, minimizing
pitch, and so on,
The problem for a rookie in these matters, is to understand the basic, choose the relevant FC…
at first glance I saw FC at 12 € and other at 200+, that’s very confusing.
Also, I must understand what kind of sensor would be appropriate to measure the height above the water, in a wet and salty environment, in addition to the gyroscope / accelerometer sensors?
In fact these very heavy requirement these software and F controller can meet, make me shy, It looks like you need to be engineer to achieve something.
That is why I d like to find a basic tutorial for a glider of basic plane,
In regard to the sensor, I also did some work to try to find an appropriate height sensor. I would say to try to use the wand initially, since it is proved to work well and I would say to succeed you really would need to try to minimise the amount of new features youe are trying. Ideally when doing R&D, just change one variable at a time For measuring the angle of the wand you could try a hall effect potentiometer. e.g http://sensing.honeywell.com/honeywell-sensing-hall-effect-rotary-position-sensors-hrs-datasheet-32301264-a-en.pdf
That said, I did do some experiments using a capacitive sensor. This basically involved coating the daggerboard with aluminium foil and then adding a layer of glass cloth over that to provide electrical insulation from the water. An electrode at the foot of the daggerboard completed the circuit to the water. I then fed a sine wave to the aluminium foil and then attached a capacitor to the electrode so that the output was ac coupled, then read the size of the sine wave at the output as the daggerboard was more or less immersed. It worked well in bench testing and gave a very linear output. I would guess you would need to coat the daggerboard in wax or some other water repellant for best results in sea water.

 For measuring the angle of the wand you could try a hall effect potentiometer. e.g
For measuring the angle of the wand you could try a hall effect potentiometer. e.g