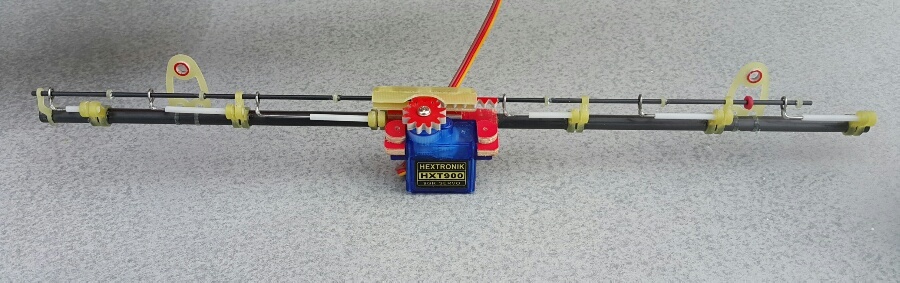
I would like my plane to enter loiter during which it would multi-drop cargo.
At the moment I think it is not possible to achieve as the commands are executed one after another.
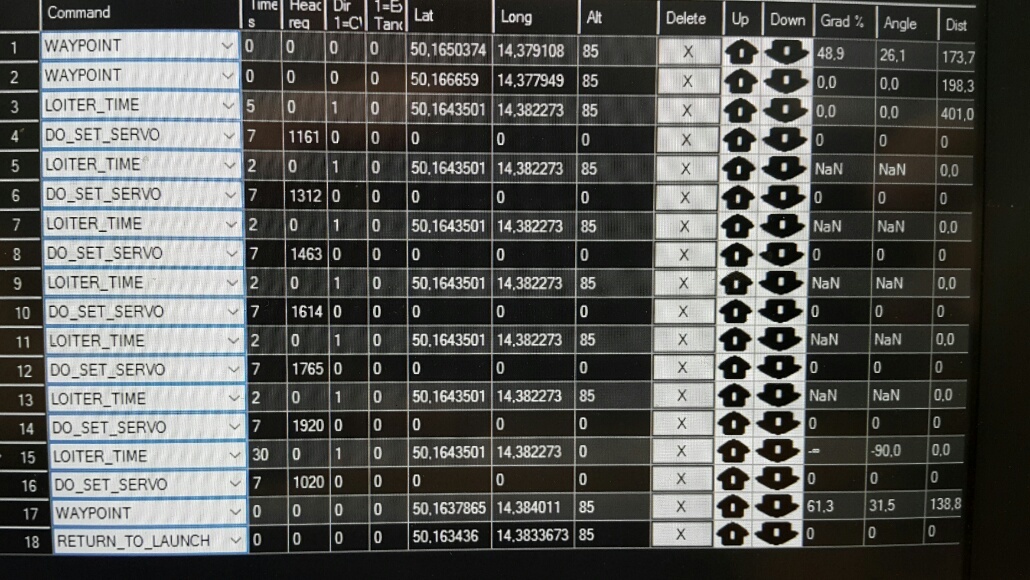
I am using Misson Planner standard command list.
LOITER_TURNS /2/ (how to make the autopilot to execute the following drops during the loiter)
DO_SET_SERVO /7/ /1200/ (Drop 1)
CONDITION_DELAY /3/
DO_SET_SERVO /7/ /1450/ (Drop 2)
CONDITION_DELAY /3/
DO_SET_SERVO /7/ /1700/ (Drop 3)
CONDITION_DELAY /3/
DO_SET_SERVO /7/ /1950/ (Drop 4)
Written like this the autopilot executes the two turns and than each three seconds does one of the 4 drops.
I would like to have the drops done during the loiter. Not before or after but during the execution of the loiter turn command. Any idea how to achieve that?