Maybe we can do something together on this. I’m working on trying to bring OA into Plane - and right away I have similar challenges. I’ve seen exactly what you are talking about with the path planning just skipping part of the pre-planned path - I think it just decides it can get to the end of the mission quicker by just not hitting some of the waypoints, definitely not desirable.
I have been looking at using some of the obstacle avoidance code instead, but still figuring out how the whole thing works.
1 Like
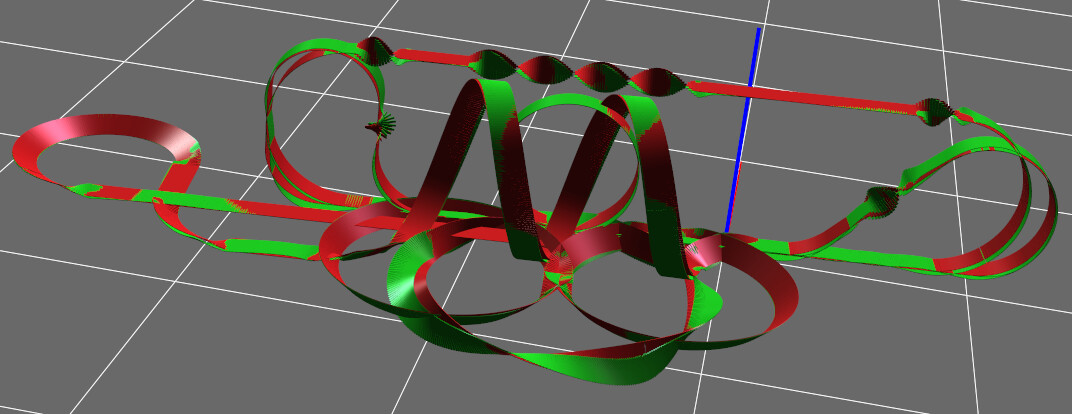
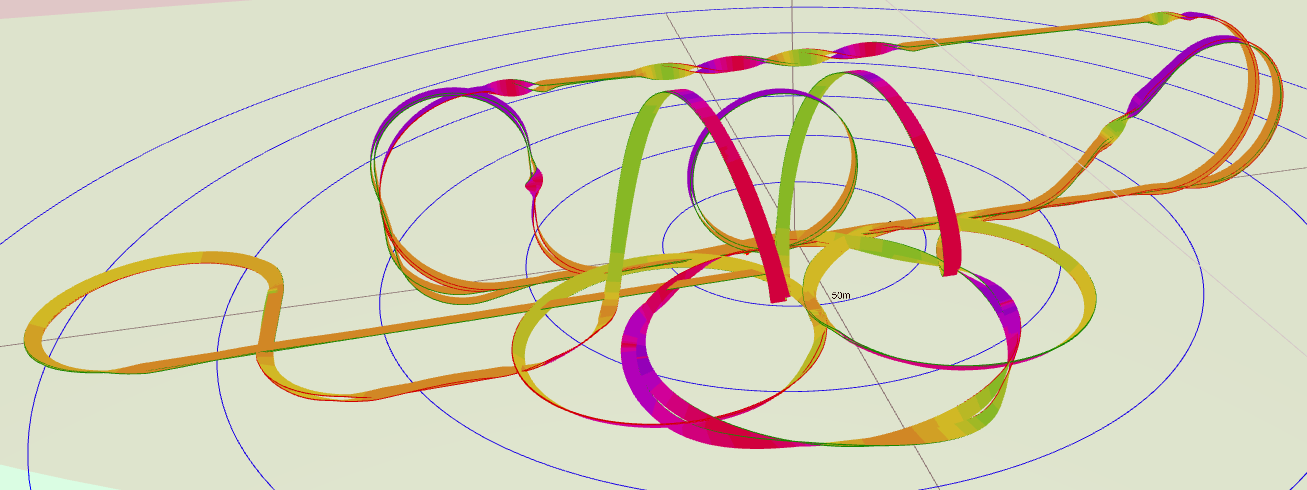
it’s in libraries/AP_Scripting/examples/Aerobatics/Trajectory/view_path.py
I plan to incorporate it into MAVExplorer, and extend for GPS, POS, XKF1 etc
1 Like
4 Likes
an intro video on how to get started with aerobatics:

5 Likes
Hi all i setting up plane for ( Arduplane autonomous aerobatics) can i add ESP32 Development Board WiFi+Bluetooth Dual Core Module WiFi just to upload missions or adjust prams when sitting on the ground or will it play up with the Rc radio link ? and it will do mav link to frsky Sport yaapu Telemetry as well it nice not hove to add a 900mhz telemetry radio as well

I would say it is OK, plenty of people use the ESP32. Just keep the radios and antennas separated as much as practical.
they must be using 900 mhz i place it 300 mm away as soon as i power it the RC link drops off
and if i power on first the radio will not lock to the receiver then i took it out put on the bench power it on
and still plays up with the rc link
@Yuri_Rage do you know, is set_target_velocity_NED() available in 4.1.x?
set_target_velocity_NED() appears to be available in Rover 4.1. I highly encourage use of 4.2, at a minimum, and with your electric vehicles, using 4.3 may even be preferable.
Thank you for your efforts to develop this wonderful technology. I can’t wait its formal release. Could you tell me when the ArduPlane V4.4.0 stable will be released?
1 Like
bravo work and nice vedio, but I could not find trick72.txt, where could I download this file? Thanks