Hey All,
We’re having some issues tuning a fixed-wing VTOL quadplane with a Cube Orange running ArduPlane v4.3.5 firmware.
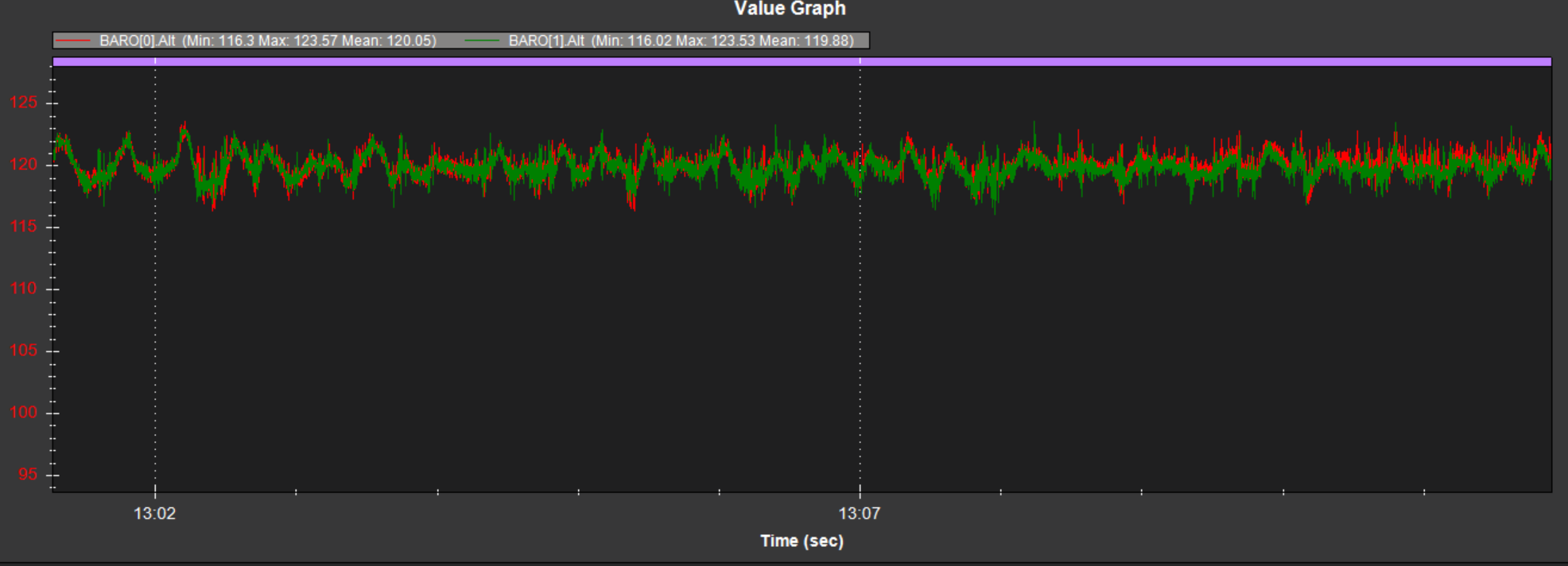
During fixed-wing flight in AUTO mode, the plane is constantly nosing up / nosing down in quite a regular pattern causing altitude oscillations between ~114m and ~124m (the mission waypoints are set to 120m). This is not desired behaviour, and also causes current spikes and reduces our battery efficiency, so we’d like to fix it. We believe the root cause of the problem to be a PID tune issue on the pitch axis.
Here’s a screenshot of the altitude oscillations caused by this nosing up / nosing down behaviour:
Here are two logs. You can see this behaviour throughout the fixed-wing flight in both of them.
Here are the parameters: Latest parameters on VILAS.param - Google Drive
Any ideas / suggestions on how to solve this would be great! Thank you!