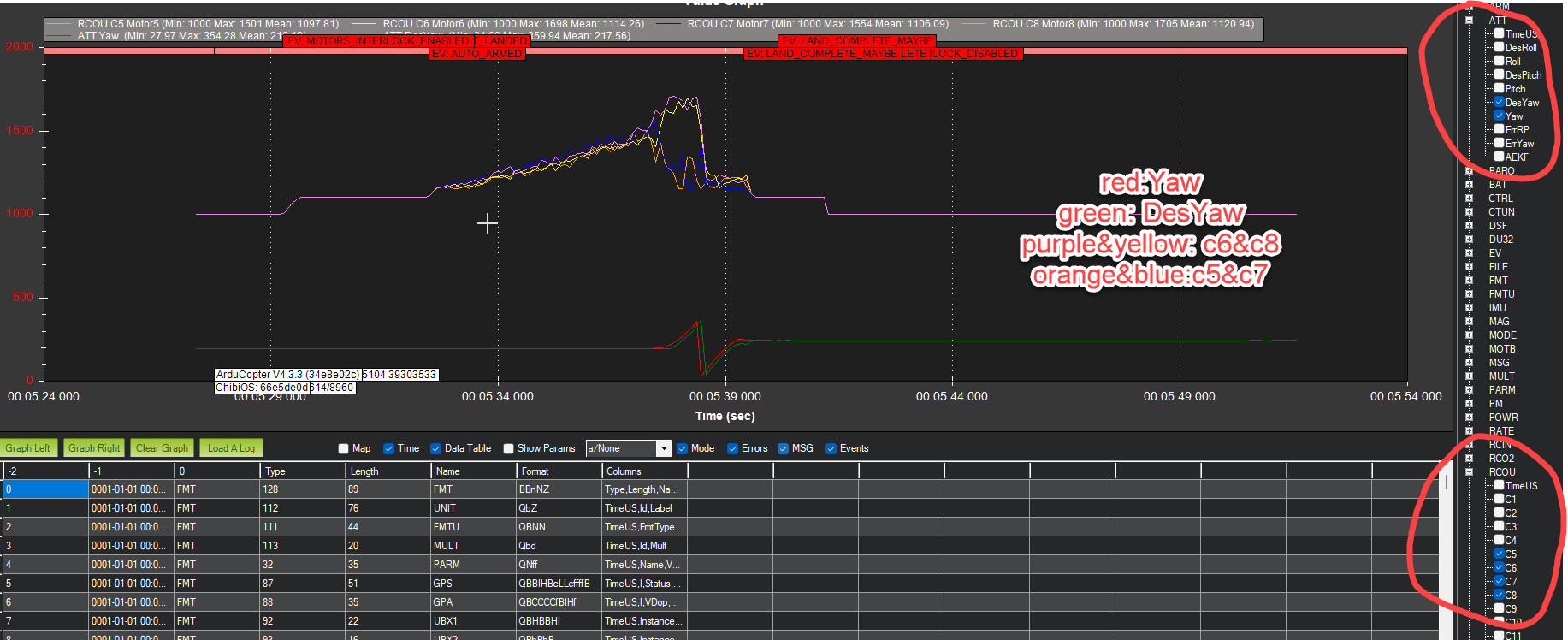
The control input I am referring to is the command from FC to the ESC. I am using Matekf405 vtol and latest ardupilot firmware. As soon as the copter takes off, it starts to spin. I review the log data as shown in the image below and observe the following behaviors:
- DesYaw is not zero and it follows the Yaw. So it means the spin is not due to unintentional Yaw command input from transmitter.
- Control outpust(C5,C6,C7,C8) are different. As the Yaw starts to change, C6 and C8 have higher inputs, but C5 and C7 have lower inputs. Based on my configuration, C6 and C8 correspond to motors that are in diagonal. Same for C5 and C7. And the spin direction agrees with the increased speed in C6 and C8. If the Yaw is not due to unintentional input, does this mean the yaw controller is doing in the opposite way?