Hello everyone,
I’m currently encountering an issue integrating the ZED-F9P RTK GPS with my Cube Orange on a rover project. I aim to utilize the RTK capabilities for precise navigation and need to configure dual ZED-F9P modules for accurate yaw measurements. However, I’m facing communication problems between the ZED-F9P and the Cube Orange. Below are the specifics of my setup and the issue:
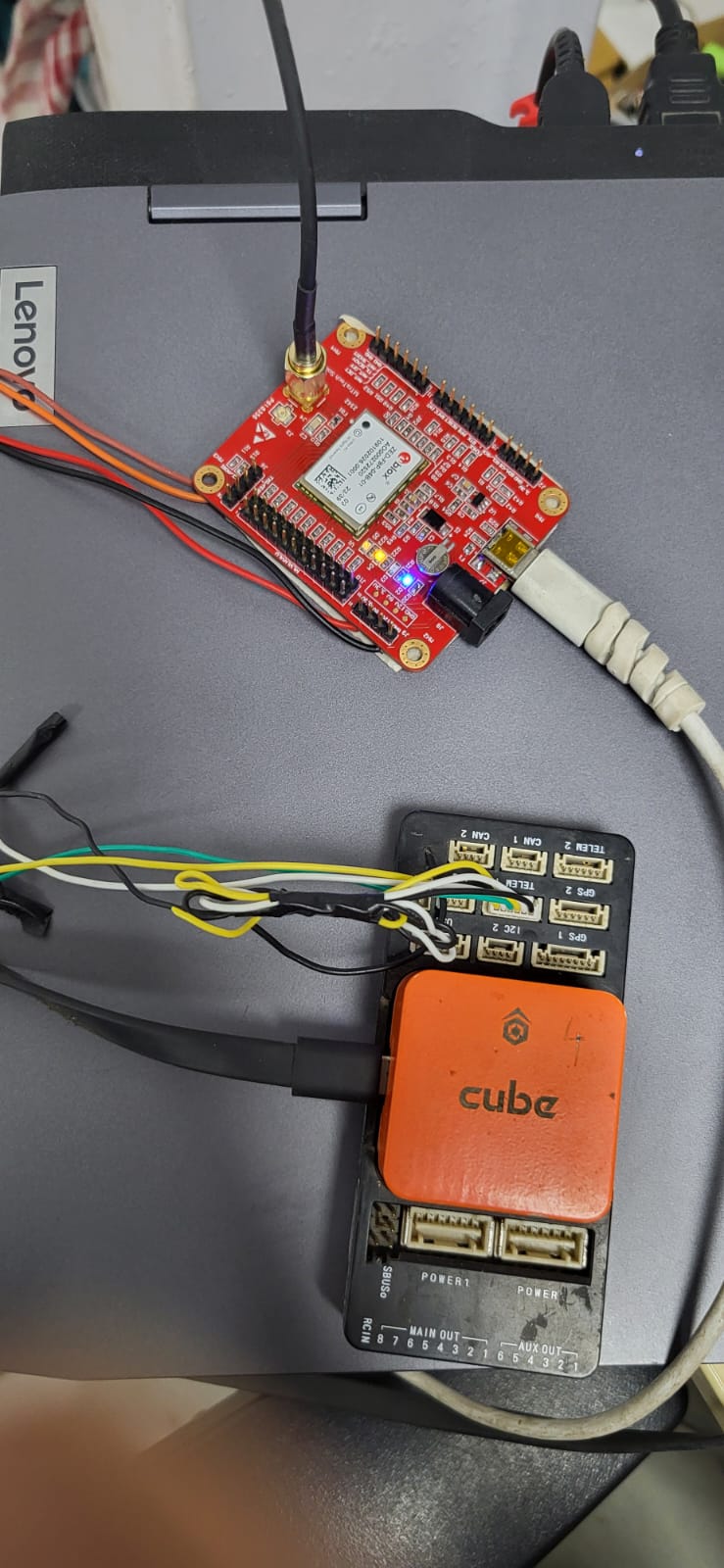
Hardware Configuration:
- Autopilot: Cube Orange
- GPS Module: ZED-F9P
- Connection: ZED-F9P UART1 to Cube Telem1 Port
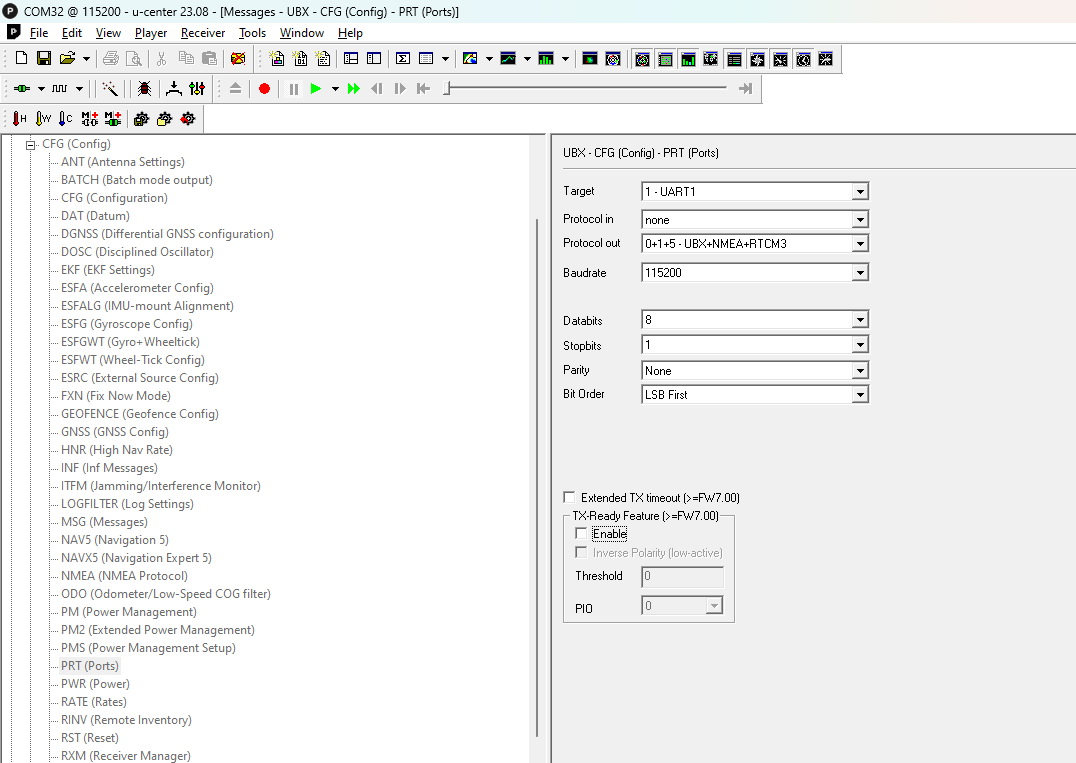
Software Configuration:
-
ZED-F9P Setup: Configured in the u-center application to send NMEA+UBX+RTCM messages over UART1.
-
ArduPilot Settings: When
GPS_TYPEis set to 5 (NMEA), I receive a 3D fix. However, changingGPS_TYPEto 2 (UBLOX) results in “no GPS” status.
Objective: To receive UBX messages on the ArduPilot controller for integrating dual ZED-F9P modules in one rover.
Issue: Despite configuring the ZED-F9P to send the required messages and adjusting the ArduPilot settings accordingly, I am unable to establish a successful communication link for UBX messages. This issue is critical for my project as accurate yaw measurement is a requirement.
Could anyone please guide me on what might be going wrong or what settings I need to adjust either in the ZED-F9P configuration or the ArduPilot parameters? Any insights or similar experiences shared would be greatly appreciated.
Thank you in advance for your assistance.