Hi, when I start controller into ros using roslaunch mavros apm.launch fcu_url:=/dev/ttyUSB0:921600
there is some topic inclue tf sending tf frame is true or false etc. but when I run the command rosrun tf view_frames into another terminal I see this kinda tree:
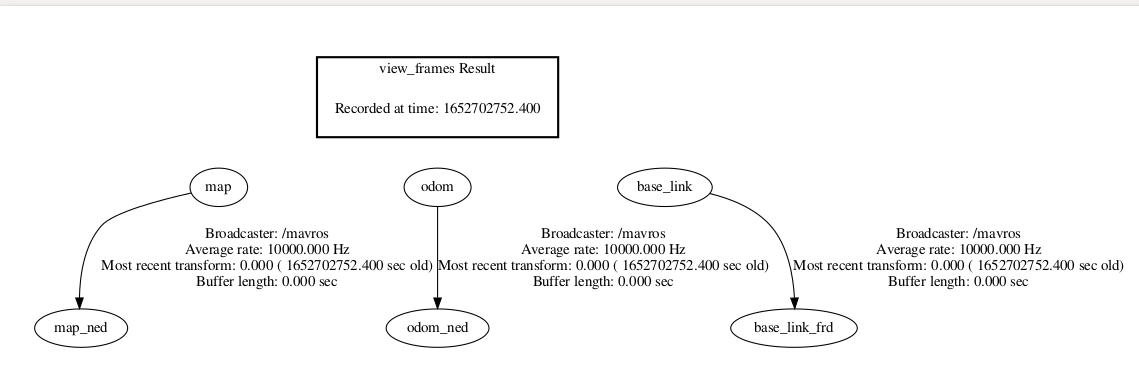
what re the ned means into tree? I want to construct file (urdf) for my quadplane and as my knowledge map is the world odom is about moving and base_link can be chassis and controller location into chassis (empty quadplane) can be located into somewhere givinf its own coordinate system as its center 0 0 0 but here there is seperate baselink map and odom here, does it given as default to adjust for our purpose, or does it has to be leave like that?
Briefly, could you explain why this tree like that and my purpose is to make landing with aruco board into quadplane firmware, I know it doesn’t exist and I will implement and change the firmware wrt necessaries but right now, I am detecting aruco board into ros and broadcating its’s frame but I am confused connecting its frame to this tree.
Could you help me with this issue? If I wrong or confused in explanation please ask by mentioning the part of my question , I can correct them.
Have nice day!