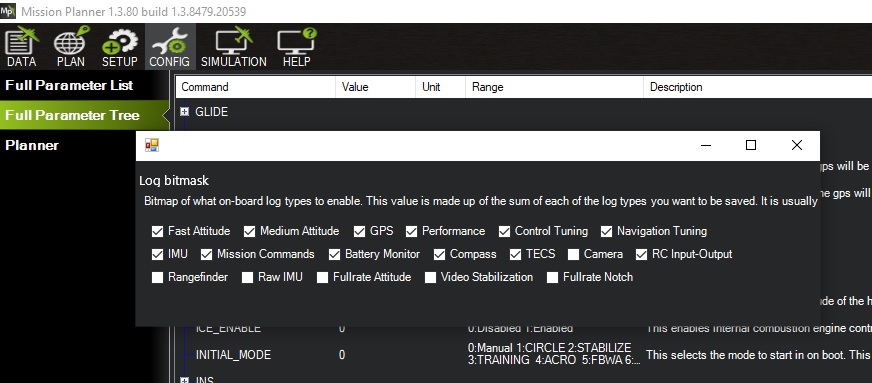
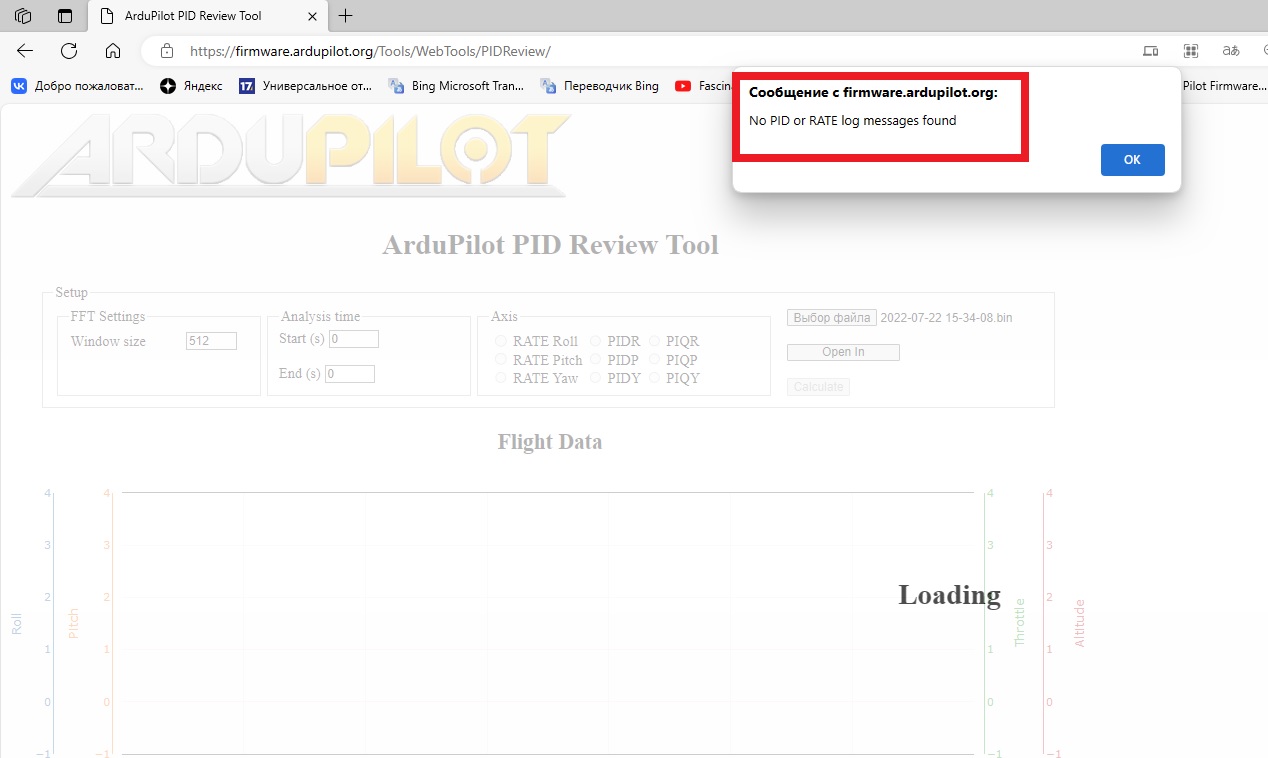
Hi all! I ask for your help. I can’t use this ArduPilot PID Review Tool because this message appears. What parameters should be set in the parameter sheet to record the necessary PID and RATE parameters in flight? On the screenshots of setting my parameters. Where can I find documentation on how to use this program? ArduPilot PID Review Tool
Thank you for your attention to my problem!
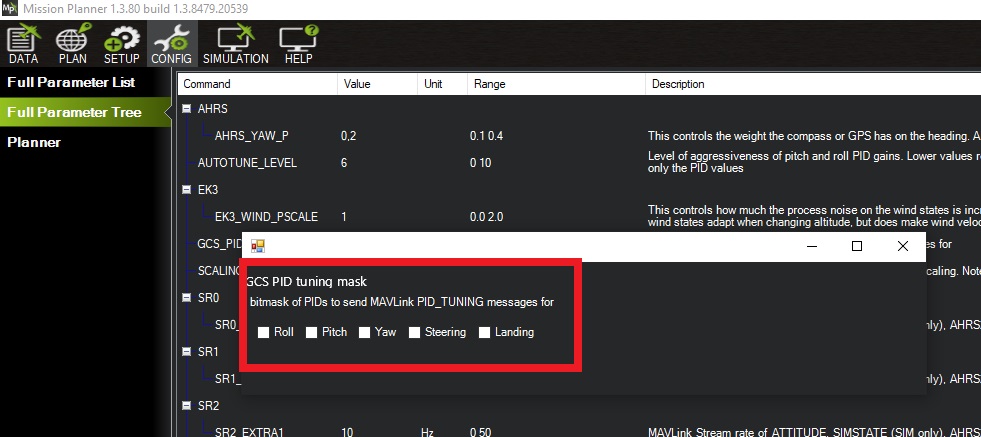
GCS_PID_MASK is for real time streaming to the GCS. You should be getting data with that value of log bitmask.
Can you upload the log here, I will see if I can tell what is going on.
LOG_BITMAST > Control tuning is the bit you need to set.
https://drive.google.com/drive/folders/14VRfZh9u1hLd6MvG2VO6d1IRqCsQYUp3?usp=drive_link
These files can be opened in the UAV LogViewer, but this does not work in the ArduPilot PID Review Tool.
I would like to receive comments from you about the quality of the PID setting. Do I need to repeat the AUTOTUNE setting or make a manual adjustment based on the results of the analysis with your tool?
Thank you for your attention and hard work in the development of the Ardupilot platform!

The data is there in the log. It should be working, I will see if I can fix it.

It turns out I never enabled plane PIDs, currently it only works for quadplane and copter. This is because I needed to double check the units.
I have just merged a update that should enable for plane, PIDReview: enable for plane forward flight PIDs by IamPete1 · Pull Request #78 · ArduPilot/WebTools · GitHub
It should start working after a hard-reload.
It does some plots with your log but you will get better results with faster logging, also select “Fullrate Attitude”.
2 Likes
Great result, it works now, I see the graphs, thanks for the great work!
Is it normal that the ‘step response’ in many of my tests dont actually reach unity? The default of many ‘I’ terms is zero anyway so wont that cause a result like this?
This PID tool is great but Im not exactly sure whats a good or bad looking result?
Any rules of thumb would be great.
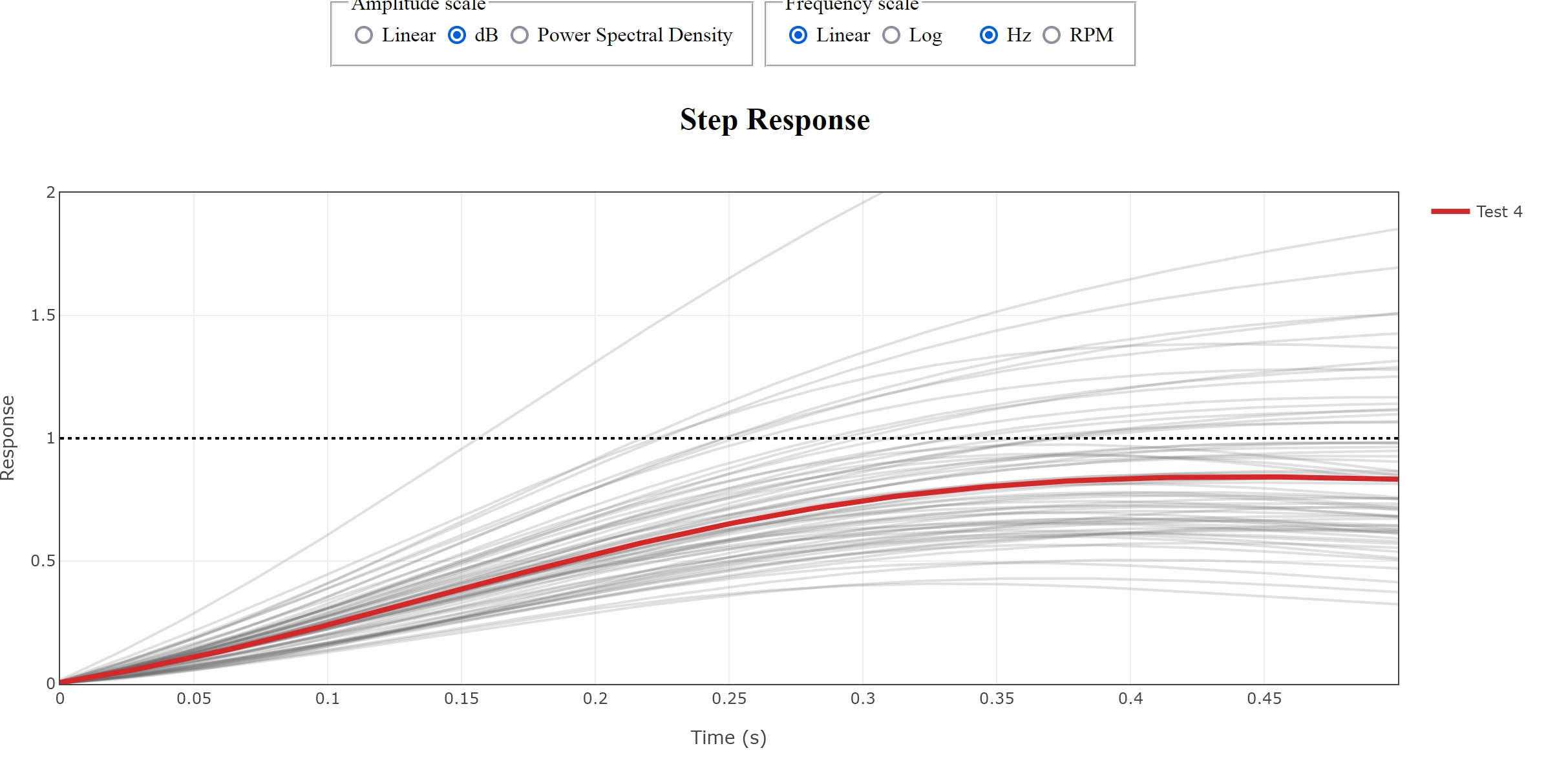
Its a limitation of the method. Unless there is good consistency between your “shadows” its probably not trustworthy.
1 Like
I think that there could be a bug in the tool in the sense that the blue line sometimes is shown much lower than the average sum of grey lines. I sometimes have to change the time frame by a few seconds, and reload, and then it snaps in. The graph shown by OP has the blue line coincide, but one must be really careful when it seems to be much lower
If you have a example log and the settings you set in the tool I can take a look.
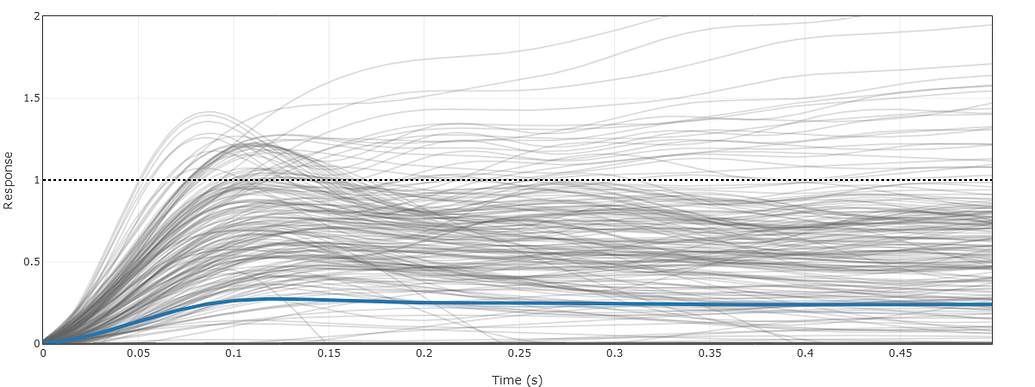

I uploaded two examples where the line seems to be totally wrong.
As I said, if I change slightly the time frame, or even click on db / linear box above that image (the boxes correspond to a different graph above), but often this does the trick of reloading the step graph with the averaged line correctly displayed. I would say that every third log comes out like this.
That’s an excellent tool! But how would one use it to fine-tune their PIDs? I’m struggling to see the effects of I adjustments in flight, for example. How can I make the most of this tool?
Also, the step response graph is only showing a zero line, even though I believe I have all the necessary logging enabled.
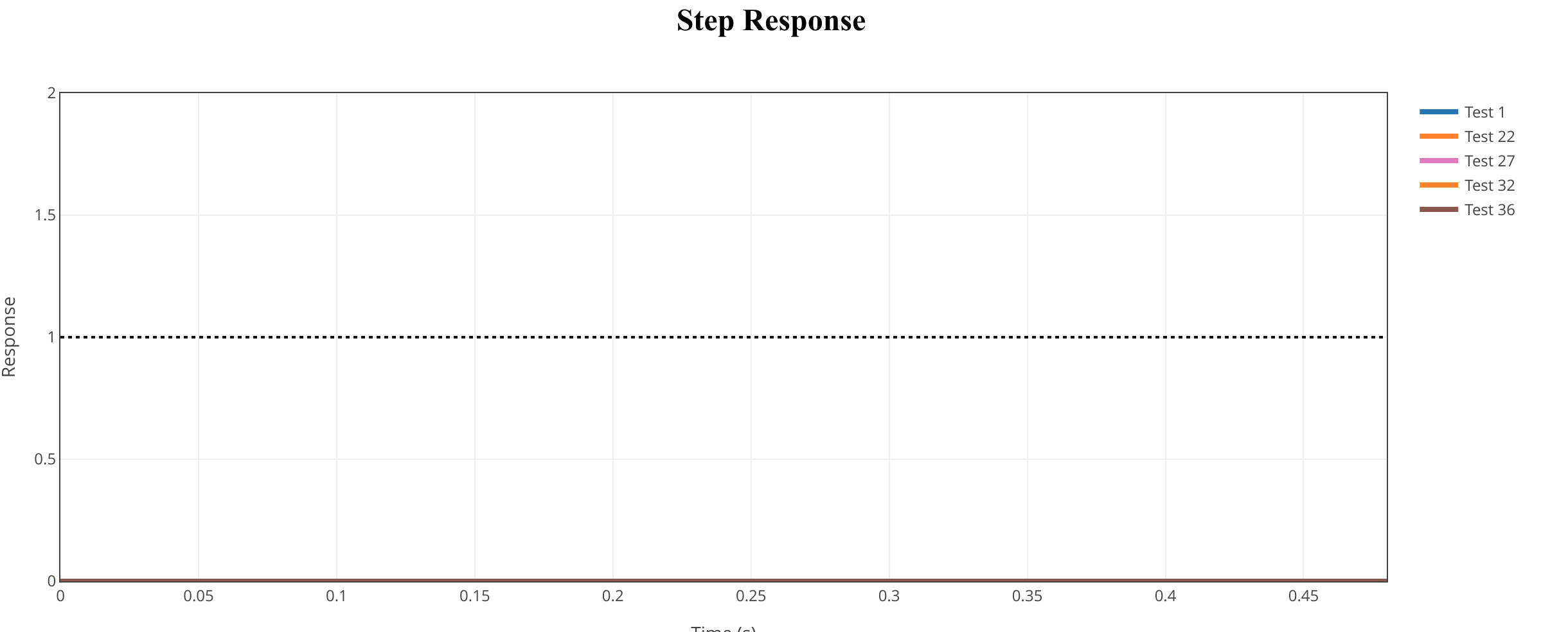
My log is here
Most probably you did not enable fast Attitude logging.
I did enable it for today’s flight

But unfortunately I still don’t see a step response
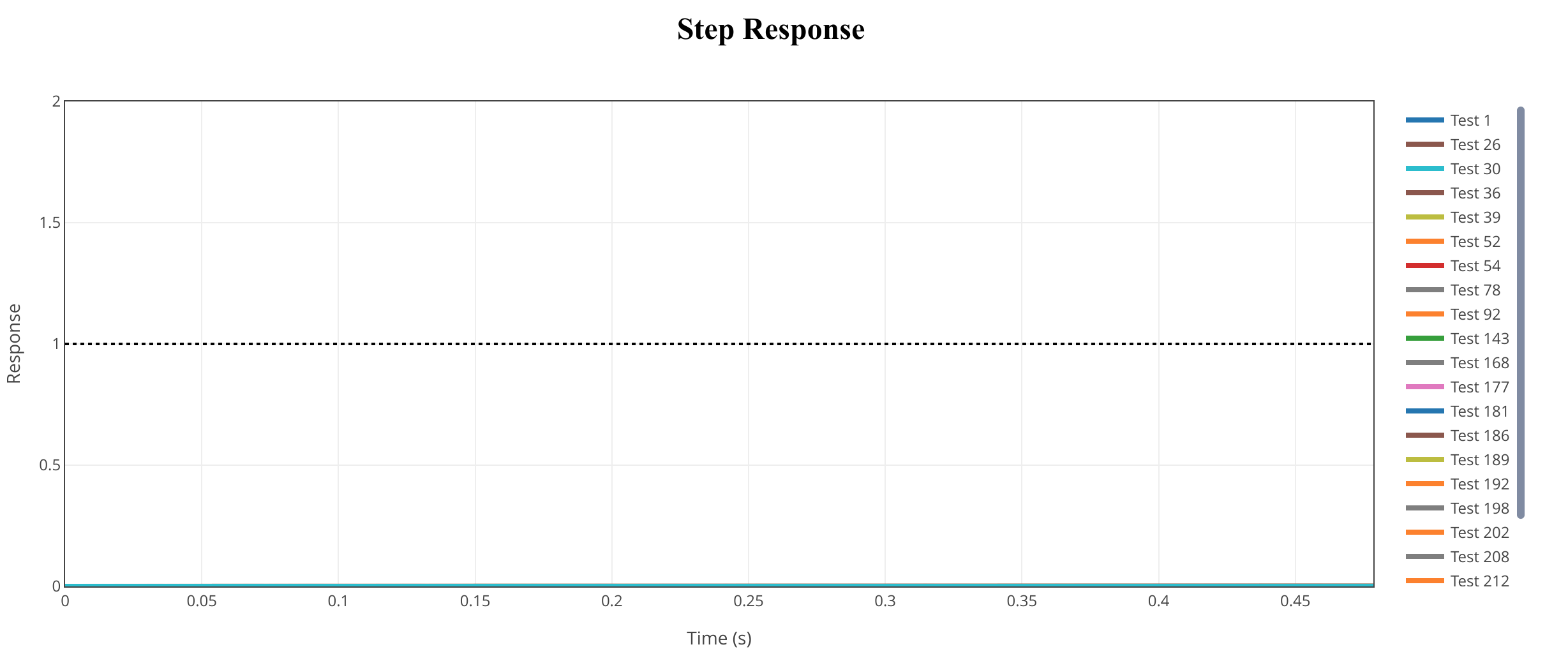
Zoomed in
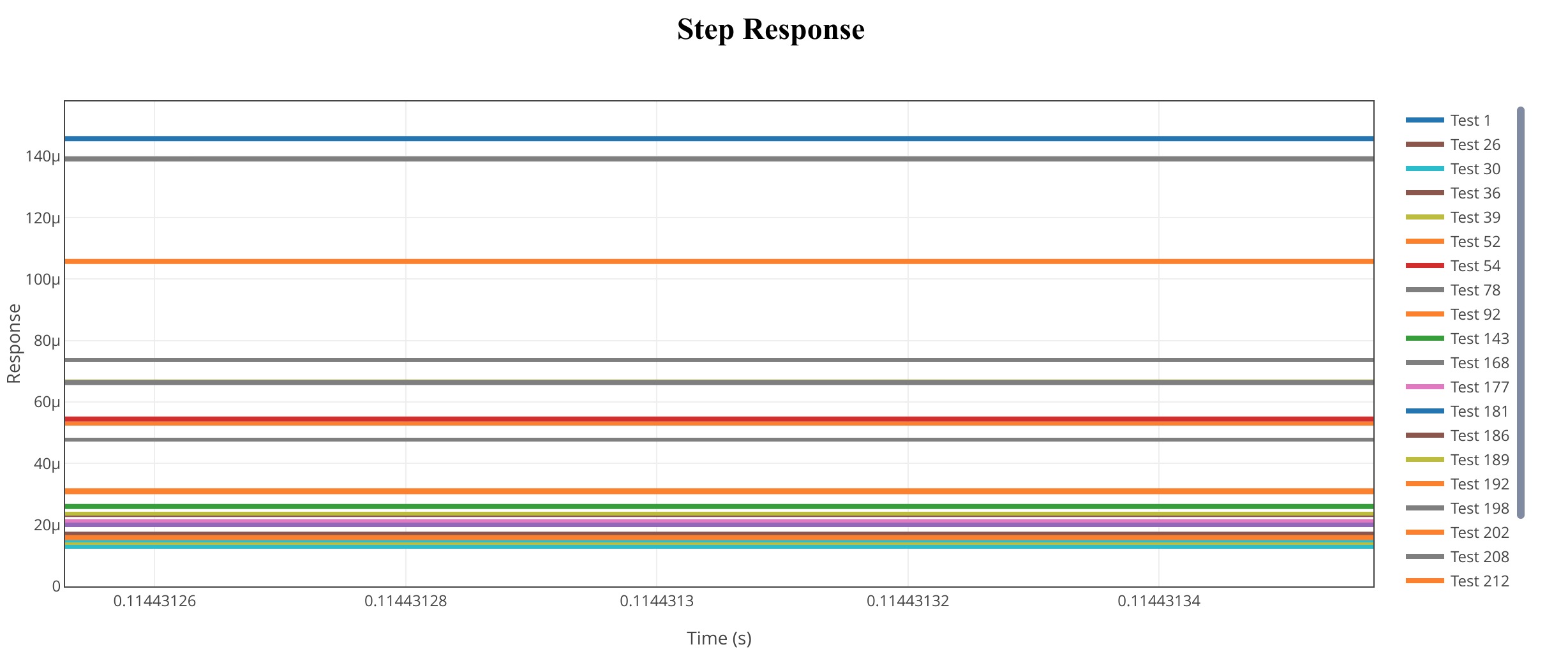
Do I have to enable anything else? Thanks!
Log here.