By my understanding, the FMUv3 design is licensed CC BY-SA 3.0 from the original reference design, of the PX4 hardware project: https://github.com/PX4/Hardware
This license type explicitly allows commercial use.
Specifically, the design files for the FMUv3 Rev.D are located here.
From the last time I pulled up the design in Altium Designer Viewer, the reference design is very close to the final commercial product that ProfiCNC produces. Flat-flex IMU assembly and all.
Furthermore, CUAV had published the full design files of the Pixhack v5 on their hardware GitHub, prior to all of this having set them on edge.
Is there something in the timeline between the PX4 original reference design and the ProfiCNC development & release that made the original license of the FMUv3 invalid?
Edit: I’m reinstalling Altium Designer Viewer to double check the design files. Its been a while, so I have to make sure I’m not blowing hot air, here.
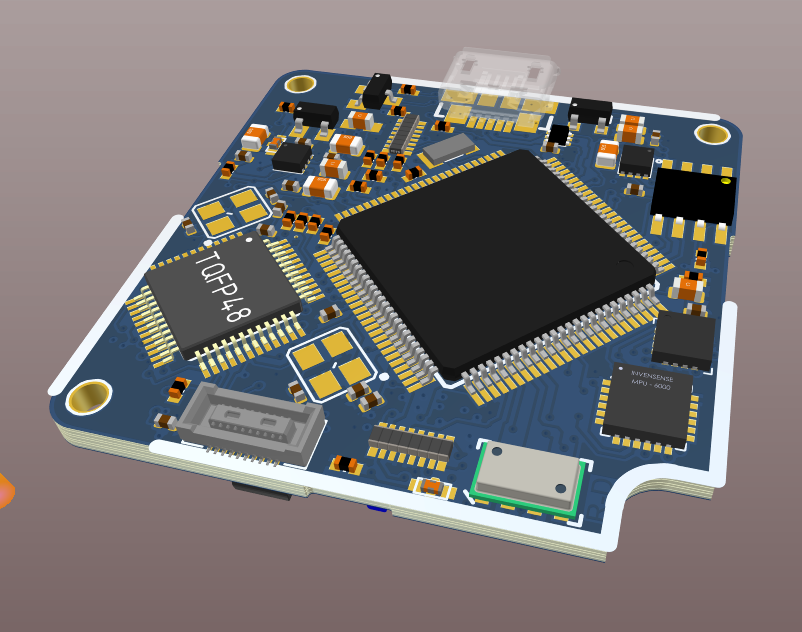
Edit v2: I rechecked the PX4 Hardware design files. The IMU is in a separate folder. See images below. The design below I believe is commercially usable with attribution and share-alike. Otherwise there needs to be a clarification of design licensing.
Top view of Reference Design FMU Main Board (bottom part of “the cube”).
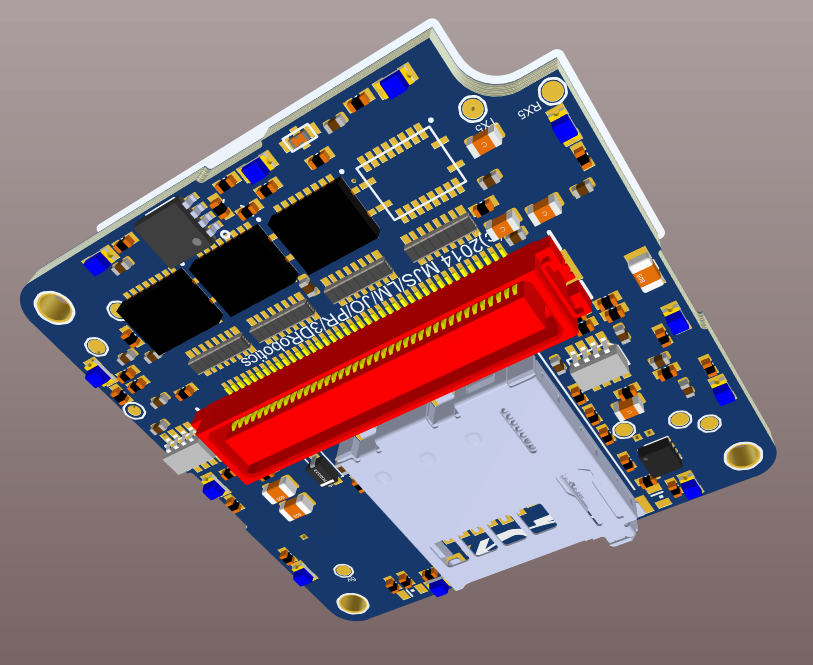
Bottom view of the same.
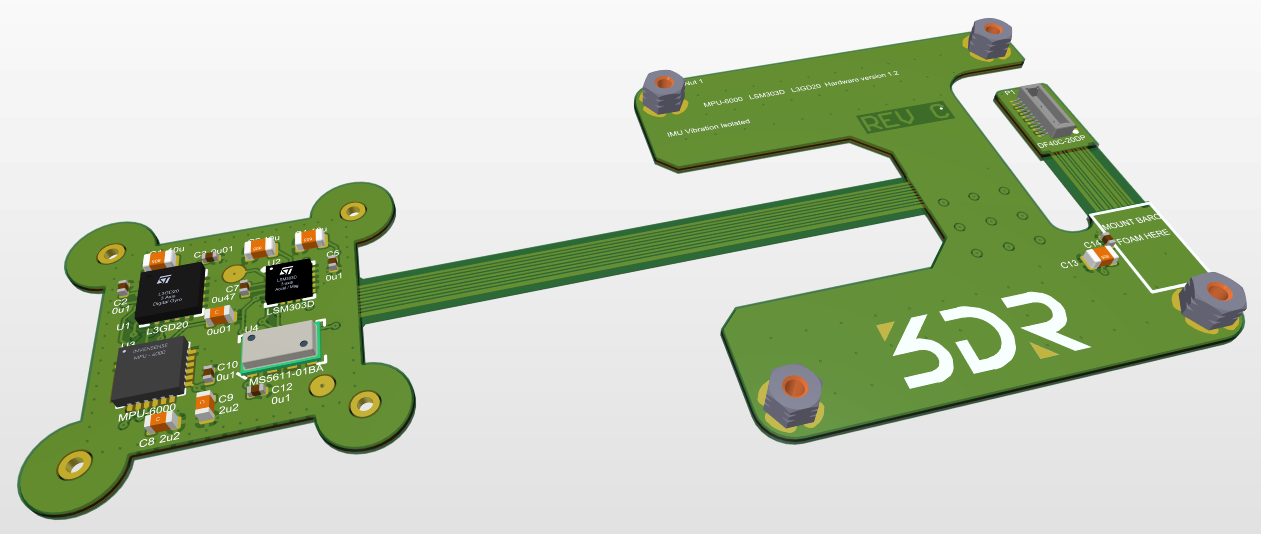
View of the Flat-flex IMU assembly. This gets sandwiched in damping foam, folded up into the upper part of “the cube”. Top-right-ish connector mates to receptacle in bottom left frame of first image.
All that said, it does not appear that there exists a reference design for the carrier board. I do believe the stepped height of the carrier board is a technical necessity given the differing heights of the Molex CLIK-Mate power connectors (as compared to the lower profile JST-GH accessory connectors).