But on that note, no I am not making you wiring diagrams. External LEDs are documented in the Wiki. You claimed the GPS has no LEDs, which was false. And you claimed there was no USB, which on the cube is false. Figure it out.
1 Like
I claim that I have no visible leds in flight if the craft is over head. why is this so hard to understand. regarding wiring diagrams I only said that because the here leds are disabled when hacking the cables this is well documented. Also why should i have to remove the body just to access the USB on the Cube. could be a small issue to some but not me.
Back to topic. According to this image the USB and LED are externally mounted this is what I need so thank you to the hardware designer sorry for any confusion.
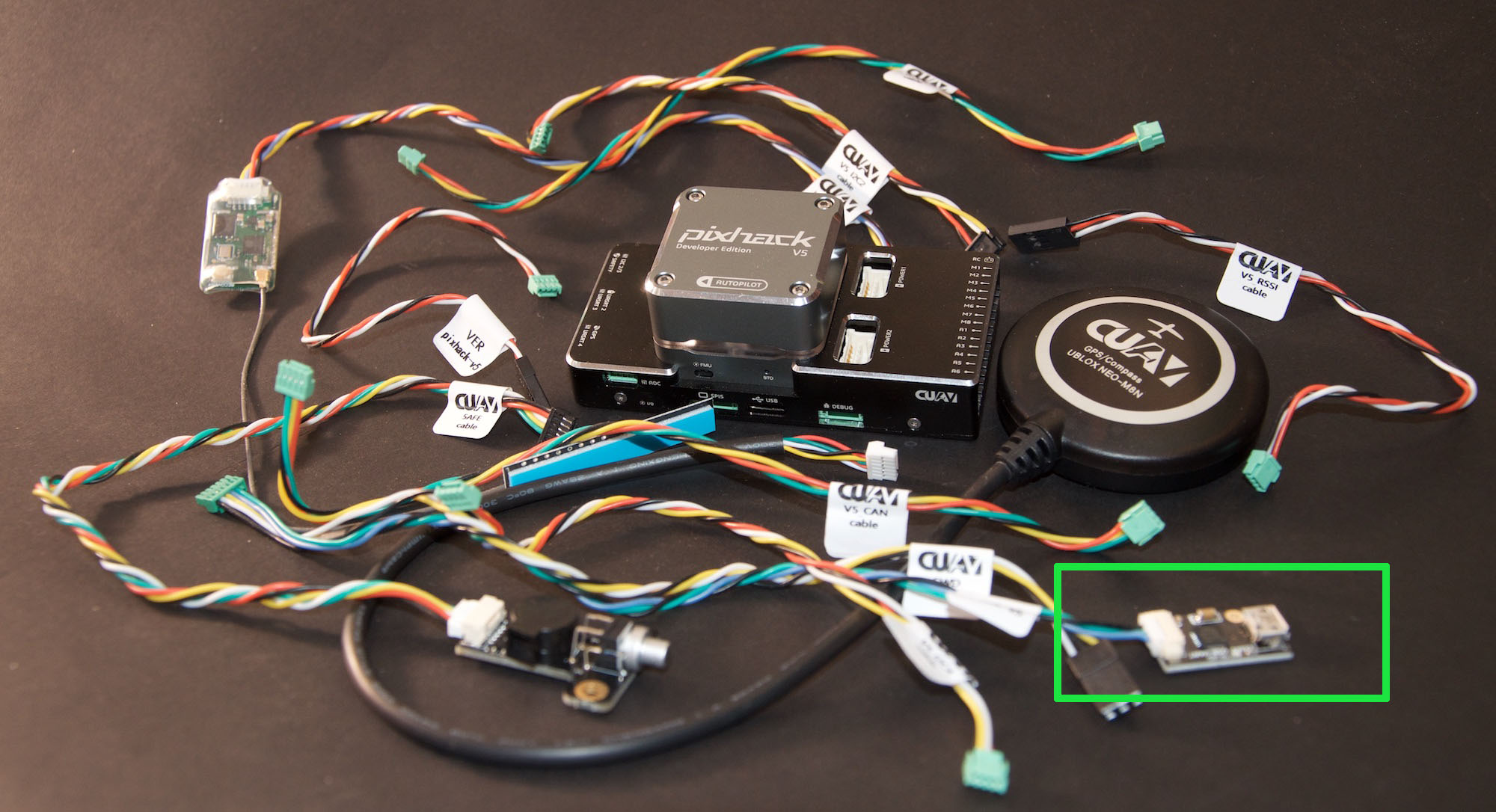
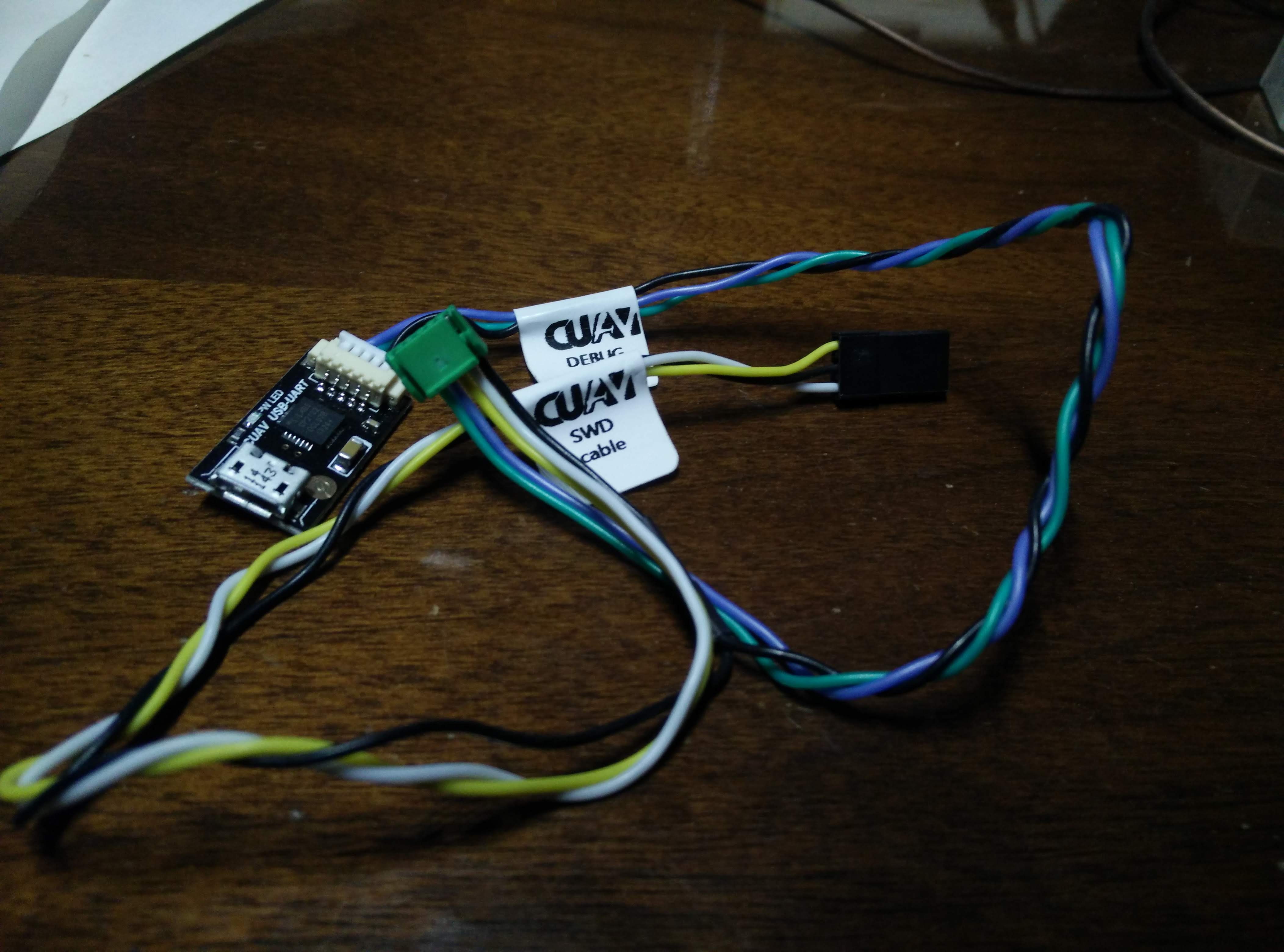
Sorry if the picture is misleading, but what you marked is a debug/SWD cable and that small pcb is a serial adapter , which has been very handy during the porting of ArduPilot to run on the v5.
The USB-C port is on the carrier board.
Right, thanks as a request I would like to see an included wiring cabe to use the Pixhawk classic external led and usb connection it is a simple design lightweight works well and tested with the new ChibiOS cr-2 or… one from the manufacture " including cable "that would be very cool.
I remember seeing something like that (external usb and led extension) from another other vendors, but can’t recall where.
On the Pixhack V5 in my heli where I have to take the canopy off (bolted on, not quick remove) I have a short USB C extension cable plugged in so I can load the latest dev build without taking the heli apart. Works fine here.
I also have a kit here that puts the LED output from any PX4 board to a unit that runs them as like navigation lights on the aircraft. It uses the I2C port. I’ve never installed it (yet) but it should work with old Pixhawk, Cube, Pixhacks - anything that has I2C. It is powered either with a little BEC, or off the servo rail. I think I got it from Amazon.
1 Like
Are you taking about the one where both the LED and USB are separate?
My Pixhack V3 came with a combined one, in it’s own little alu case. Neat, but impractical for installing anywhere. (You’d have to glue it on somewhere).
The mRO X2.1’s got a handy separate USB cable (as there’s no USB plug on the board) which can be panel mounted fairly easily.
For LED’s, I find the Here GPS ones more than sufficient. I really like that product, especially now that they got the driver issues sorted out and you don’t have to guess the orientation of the compass any longer.
To get USB external mounting for the Cube I use the custom spektreworks carrier board it has a separate usb jack not connected to the main core/module that Philip warns during flight. Spektreworks is also hinting on a new usb/led external option accessory mRo v2.1 has a usb wip works well. I like the here gps however I think it could use a usb passthrough and option to split the led information and usb if any with cabling.
No just the stock one for the Pixhawk classic era.
You’re talking about those little square ones with a micro-USB port and 7 wires coming out of it, going to two plugs? Can’t you use one of those with the 2.1 by just changing the connectors on it?
The issue is the attribution requirement of the license for the FMU board, and the attribution and non-commercial requirement for the IMU board.
It’s absolutely incorrect to call the PixHack v5 a clone, so I hope I haven’t given the wrong impression. It’s clearly an evolution of the design, and something I’d support after they clear up the licensing issues. Diversity in suppliers is fundamentally good for the community.
Perhaps there is some confusion because nowhere in in the PX4 reference design is CC BY-NC 3.0 used
http://dev.px4.io/en/contribute/licenses.html
The independent IMU board in the Pixhack V5 is CUAV’s own design. ProfiCNC only claims copyright on IMUv3 with CC BY-NC 3.0. The board in the V5 is clearly not a IMUv3 design. With the two units diassembled on the bench and examining them the two are so clearly different a comparison is not even possible.
Pretty much like comparing two different cars - they both got engines, transmissions and wheels, but the similarities end there. And it’s pretty hard to claim copyrights or patents on the fact that cars have engines, transmissions and wheels. Although somebody might like to try to lock up the auto market by claiming they own copyright to to any design with engines, transmissions and wheels, in the real world of patent and copyright law it’s not going to work. They can design their own transmission and patent it. But it’s like big whoop - a competitor can design their own transmission and patent it too. But neither one can claim they own exclusive rights to the concept of transmissions. Nor can they claim exclusive rights to the concept that wheels are round.
I really think we need to move beyond all this. If you examine the unit in detail it is clear CUAV applied their own engineering to the design, it might look similar to another product, but they have followed the design reference requirements of the PX4 open hardware project to the letter. It is obvious they intend to compete against the Cube in the flight controller market. But the Cube better sit up and take notice because this one is a serious contender. If you want to win in the hardware market you don’t do it by complaining about the competition and trying to lock them out. You build the best there is so people buy your product.
2 Likes
You’ve got a point. While technically Apple won the “Square icons” copyright fiasco against Samsung, it did little to affect Samsung, and ultimately Android’s, dominance in the smartphone arena.
Anyways, yay for competition, right?! Glad to hear folks like @ChrisOlson has pulled this thing apart and thrown it through the ringer on his TradHelis already. Maybe ProfiCNC will innovate a new product now and the competition will heat up!
Yes, a v5 in a smaller form factor that’s not stacked, but smaller form factor than the Pixhawk 4. Get rid of all the extra cruft in hardware that’s not needed. Throwing in triple gyros/accels, mags, baros, etc looks good on paper. Does no good in the real world. Calibration and drift issues makes it almost impossible to get them to agree - and the EKF system is designed to cope with a failed sensor anyway.
There’s probably a bigger market for compact lower cost controllers with a sensible I/O layout that most people use, than there is for full-size luxury models.
1 Like
Yeah, something smaller is good.  I can’t afford luxury anything.
I can’t afford luxury anything.
There are small alternatives (around the FMUv3 reference) that can even be “assembled” according to your needs.
But the new reference design FMUv5 is all the rage right now, and on the CUAV PixHackv5 the current builds of ArduPilot run with all the bells and whistles turned on (ie multiple EKFs, fast logging, log replay, etc) with lots of available CPU and RAM available for the ArduPilot team to develop even more great features.
More, for such a recent board on the market, the tests do get us excellent results, such as experienced by Chris and other users on TradHeli (a PixHack v5 glued on the underside of a 480 heli or like Chris on the side), and me, using a small quad (330 flexible arms) so the perspective is very positive.
edit: I’m not even going to start mentioning the huge quantity of new boards that are already supported by the ChiBios ArduPilot, so expect lots of very cheap, bare boards, around the F4 and F7 variants of the MPU…
My old 700 nitro flybar has been neglected since it was sitting around with the engine seized up. I put a new piston and sleeve in it, new bearings and got 'er started!
I figured what the heck - I pulled the latest master and did a ChibiOS build for the old 1MB flash Pixhawk. Just got done taking 'er for a spin around the block to get rid of all the mosquitoes. Hardly no wind and still looks like somebody lit a brush pile on fire out there. 
I forgot how much power that 105HZ has with a fresh jug on it! Talk about fun!
ChibiOS works good in the old flybar! But I noticed there’s not much flash left over with the latest build of 3.6-dev in 'er.
2 Likes
If they started with the ProfiCNC design files as their basis, it’s still a derivative design despite all the changes and genuine advancements CUAV have made.
Putting the NC issue aside, attribution is important. We’re going to end up with closed hardware if we don’t acknowledge the work that goes into hardware design, and some of the unfortunate negative consequences of making it open source. It’s not like it would cost CUAV anything to have proper attribution, or even just a simple acknowledgement that the design was influenced by Philip’s work.
Again, please, this argument is redundant. They already have this on their GitHub repo
https://github.com/cuav/hardware/tree/master/PixHack_v5
I think some assumptions have been made without really knowing all the details because somebody immediately yelled “CLONE” when they first saw the V5. If you notice they even mention Hirose (Electric Ltd - “HRS”) who are the original inventors of the DF17 20,26, 30,40,50, 60, 70 and 80P connectors, originally made for mobile phones.