This right here is a nice feature! My favorite feature of the Skyviper you built is the APWeb component. While I’m sure not a lot of “professionals” would use a web interface for working with their build, I thought the ability to load firmwares, pull dataflash logs, calibrate, and all sorts of other things through that Web interface were a HUGE benefit. Is APWeb be a feature that could be added to this board?
Thanks for shedding light on the actual technical improvements of the board.
Right now the additional CPU and memory won’t make a big difference. That will change however.
For example, the on-board Lua scripting that @WickedShell is working on will really benefit from extra memory and CPU.
The other aspect of this is that software tend to expand to take advantage of available hardware. So as STM32F7 processors become more common ArduPilot will start gaining features to take advantage of them. I wouldn’t be surprised if Paul and Leonard start taking advantage of the hardware double precision floating point that it has.
The F427 in the Hex black cube is still a great MCU for ArduPilot right now though, and we will keep boards based around it working for a very long time to come. What I expect will happen is we’ll start getting new options to take advantage of the new features. Whether that matters for you depends on what you are doing.
Cheers, Tridge
not the full APWeb as it is an ESP8266 and doesn’t have enough memory for the full APWeb code. It can still be very useful though.
The firmware that comes on the WiFi adapter is quite basic. We should be able to update it with mavesp8266. That will allow it to run at high baudrates, and be useful for log download. It may also be able to be setup for firmware upload.
Cheers, Tridge
maybe has also somthing to see that the web page of CUAV is in chinese. I bought almost a year ago the CUAV pixhack V3, but at the beginning I was totally lost because I couldn’t find any documentation about the pins, and how to connect it to the different devices of my cuad. Thanks to TBS, that post complete schema of the FC I could connect it.
I really thing that you produce very good products, but, If you like to address them to the international community, you have to do an effort to provide enough english documentation.
Thank you very much for your attention and comprehension
There is backlash when CUAV popup as partners of ArdPilot with less respect for Cube. I understand developers have very hard time after 3DR failure. They really need solid echo system. And we are also in that echo system. Then, I would like to know the partnership program. It should be identify how much contribute by individual partners to development work of AruPilot. Something like partners grade identification will be enough to know when we purchase hardwares, such as Platinum, Gold, Silver, etc.
All partners are of equal status, regardless of the contribution they do to support the ArduPilot project, as you can see here http://ardupilot.org/about/Partners#howto
This is a project that is counting on the entire community, either individual users and corporations, to push forward the state of the art on autonomous control of vehicles.
It becomes much clear on partnership program. So that partnership program is one of the support system but not enough to support ArduPilot echo system. Because to ask those things is that I just have curiosity on those echo system might be fair enough and make everybody happy. Thanks.
Not my blog (sorry Luis!) but I didn’t know if I was the first to fly a Pixhack V5 in a heli or Luis beat me to it.
Stuck to the side of the frame with Velcro. I really like the peripheral rail on the end of the carrier. Makes for neater wire routing. Somebody figured out that the GPS cables are usually too short and a few cm extra cable means not having to hack a cable extension. And the cable is round so it’s easier to route.
I didn’t install the buzzer/button as I don’t care for music tones emanating from my helicopters. Neither did I use the Power Module as this unit will be going in a piston helicopter next. We only monitor battery voltage with the RC telemetry in those, as the generator keeps the battery charged. So I made up a power cable to run the board on a 2S LiPo with a 5V regulator. It will have redundant power supplies in the piston machine, but for this test we just hooked up one.
It works:
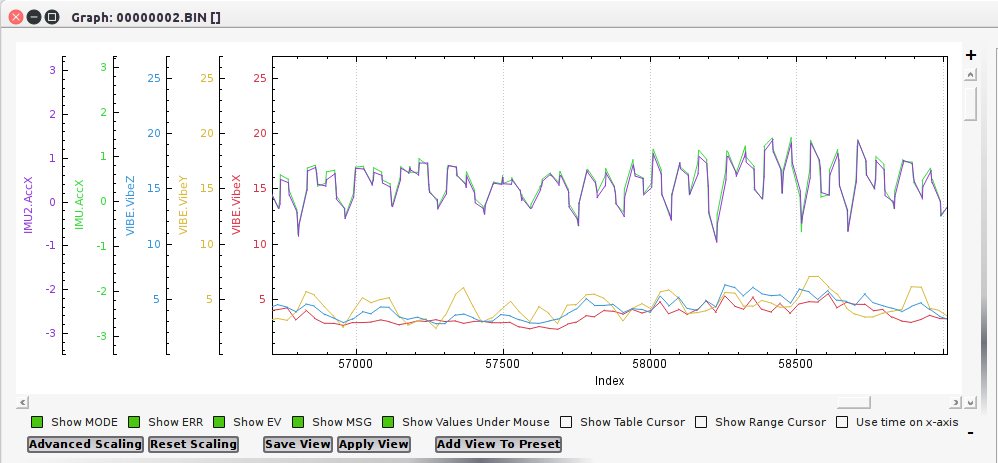
The vibes are mostly below 5, but a few spikes up to 10 in the rolls. IMU aliasing is, like, not there. Non-existent. This thing looks to be every bit as good as the Pixhack v3 for the internal IMU damping design. For some reason, ChibiOS does not appear to be putting a date stamp on the BIN logs. That is normal when there is no GPS, but it had 20 satellites on this test and still no date stamp on the log except for Dec 31, 1979. Unix Epoch is 1969, so that must be because the SD card has a FAT file system.
Yes, typically cloners can’t even be bothered to produce documentation of their product. They just toss the hardware up on BangGood and then expect hobbyists on RCG to support it for them. Or copy the hardware designs originator’s documentation. The worst is when Ardupilot developers are required to spend their valuable time supporting the hardware, making software fixes for bugs in the hardware, etc.
Rob, required? Developers as individuals choose what they like to work on and support, based on their own preferences and judgments, just like members of the community at large choose where, how or if they like to help, and/or what they want to buy. No one is coercing anyone, or could.
Seems there’s sometimes been a lack of awareness of this fact in this conversation.
@ChrisOlson Almost… you made me fly at night from my balcony to get the first v5 on the air with a Quad, including manual precision take-off and landing
But TradHelis win after all, because this test quad has a “repurposed” landing gear from a 450