Hallo, Ardupilot comunity!
I’m trying to use GPS for Yaw feature in my autonomous boat.
There are no any issues with two Ublox F9P resievers, connected to Uart 3 and 4.
Autopilot firmware version - 4.2.3
But in my setup better to use internal moving baseline processing to calculate heading using f9ps itself.
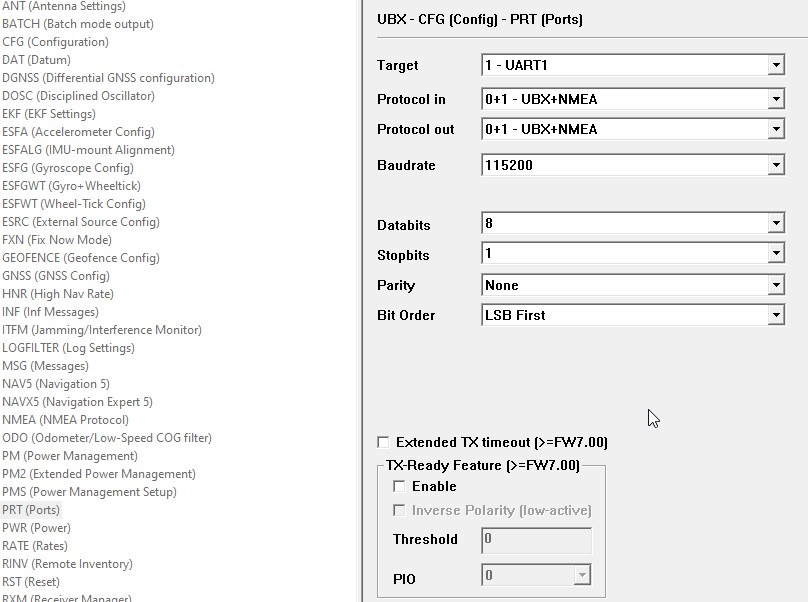
So, I connected my recievers via cross cable, set them up sucessfuly and then connected to Uart3 of my Pixhawk, then followed instructions on GPS_For_yaw, provided on Ardupilot docs cite.
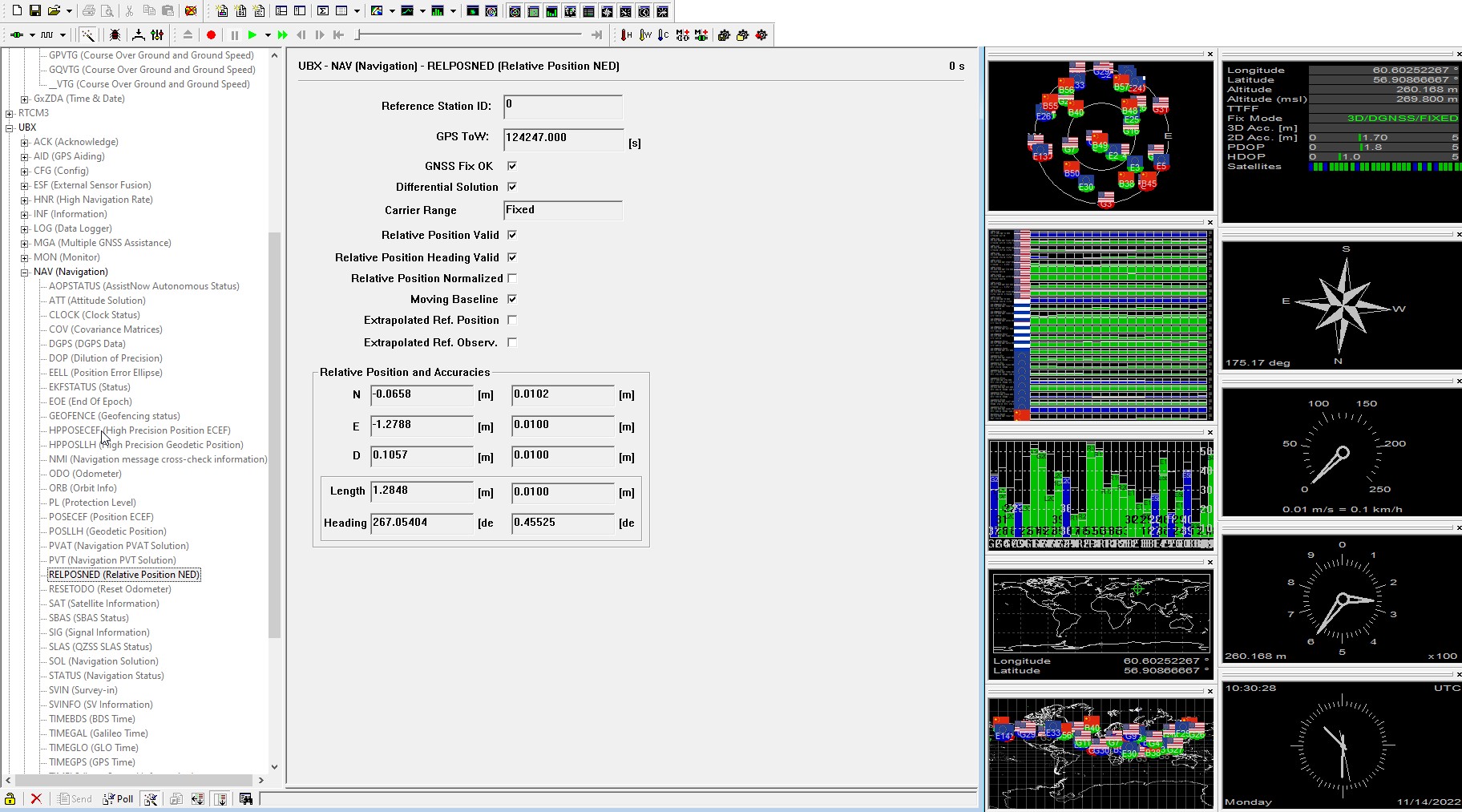
On the main screen I can see rtk Fixed, but no heading from GPS. Mavlink monitor also shows 0.
GPS Auto Config is 0
GPS Type - 5
EK3_SRC1_YAW - 2
AHRS_EKF_TYPE - 3
Looks like Ublox can only send Heading information by sending RELPOSNED mesage, but ardupilot cannot recognize it.
Help me please, i have no idea what to do with my system. May be I forgot to set some parameters, but i cannot undestand which exactly.
Thank you!