Raspberrypi running ubuntu 22.04, connected with CUAVv5 Nano running Ardupilot 4.5.5 (lastest stable).
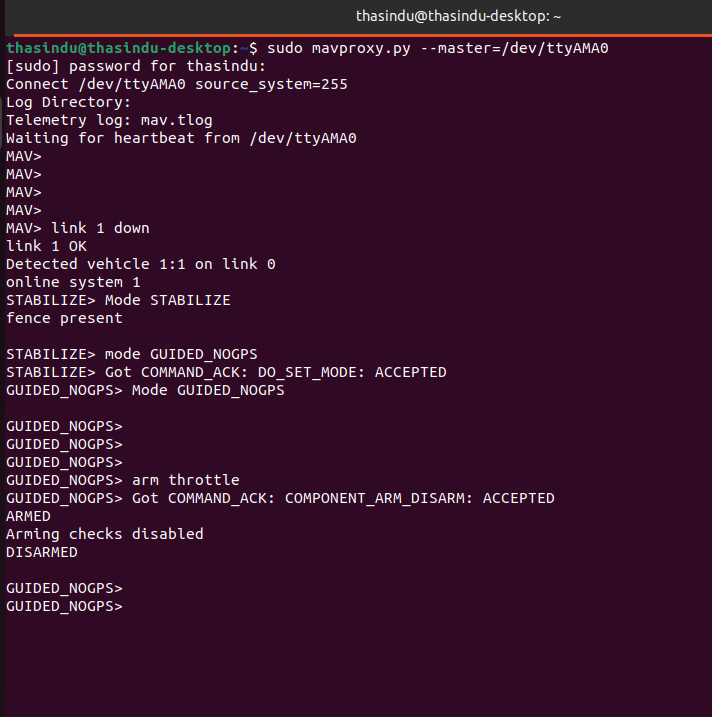
While connecting the RPi with Pix the mavproxy worked in both Serial and UDP while on the same comm link, I executed the file attached here too. Any help to execute on quad?
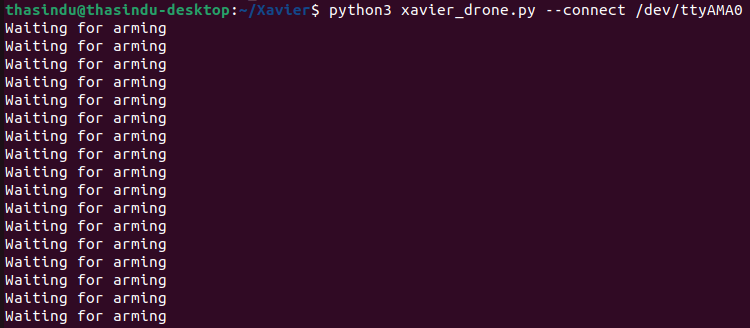
Also previously it displayed as waiting for arming.
Heres the code
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException
import time
import socket #import exceptions
import math
import argparse
I am not sure if I understand you in detail. Do you have the mavproxy still running, when you execute your Python code? That would mean, both try to connect the ttyAMA0 com port (which would not work).
I tried both 57600 and 115200 bus didn’t work. Ardupilot guide they mentioned about using 57600 by default. Both didn’t work. It connected to mav commands but didnt respond to script.
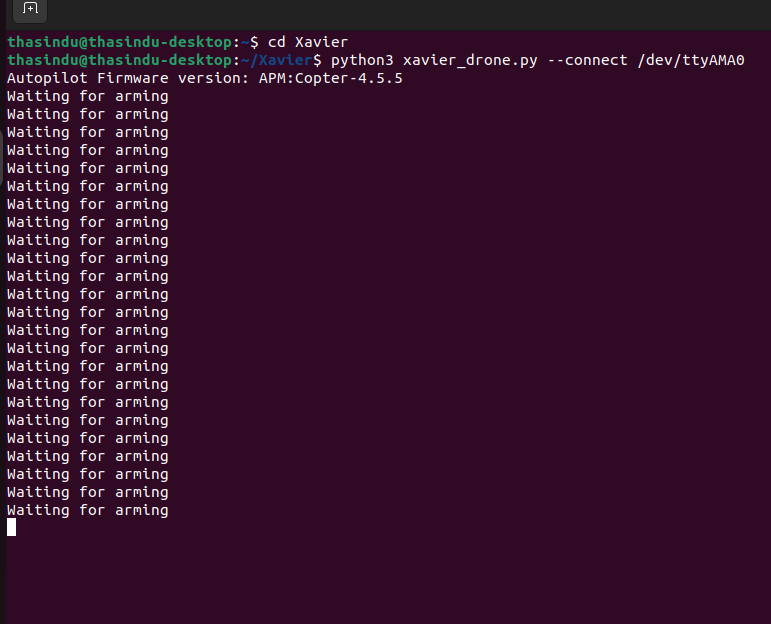
How do you verify your connection is healthy? try a print after connection to see.
try this and make sure you know which RPi dev port number you are using.
from dronekit import connect
# Connect to the Vehicle (in this case a serial endpoint)
vehicle = connect('/dev/ttyAMA0', wait_ready=True, baud=57600)
print(" Autopilot Firmware version: %s" % vehicle.version)
Im using the telemetry 2 port, Telemetry 1 was used for the wifi telemetry and currently for the MTF-01 sensor. I configured those correctly. Will check with the print function and see. Earlier also we tried all the possible connections, but signals are sent and received but no actions. Do you have like any other turotial or guide for this ?
Your problem does not seem to be on a serial or UART connection. you connected and printed the Arducopter version. Is your drone healthy for a normal pilot flying in the first place? you must change to GPS GUIDE Mode to use a companion computer to arm.
you can try Google search for Dronekit arming example, what is needed to check on the drone before sending an arming command.
Yes it performed normal for both manual and mission modes. We are trying to use it with the optical flow sensor but before that the gps was attached and even then same thing happened. Will check with some other codes maybe.
Hi, So I found a solution, using pymavlink, not the connection is stable and it works fine. Now the issue is with the non-GPS navigation using Optical flow sensor. Will create a seperate thread for that, Thank you for the suggestions.