I am a newbie. I have a tarot 680 with ardupilot . It does fly but not well. It tilts down and drifts west and south in stabilize mode. Altitude hold makes the drone fly up and then hold for a second and then drop and then fly up again. Loiter makes the drone fly away to the west.
When I try to calibrate the compass via telemetry and mission planner the dots appear and it does the calibration on different axis but after about 1 minute of calibration it finishes really quickly . it never gets more then 600 points of calibration.
Please help. Im on the verge of selling this and going dji naza.
Ive swapped compasses/gps modules, flight controllers , reset flight controller and reinstalled mission planner and issue remains.
thanks for the response. Im getting pretty desperate.
I have a Radiolink at10 transmitter and receiver.
Ardupilot 2.8 with external compass.
I did the acclerometer( nose up, nose down, left, down and right)
did compass Calibration using Telemetry
running mission planner 1.3.45 build 1.1.6286.16738
ardupilot v3.2.1
motors - ax-2810q kv750
1238 props.
afro esc 30A
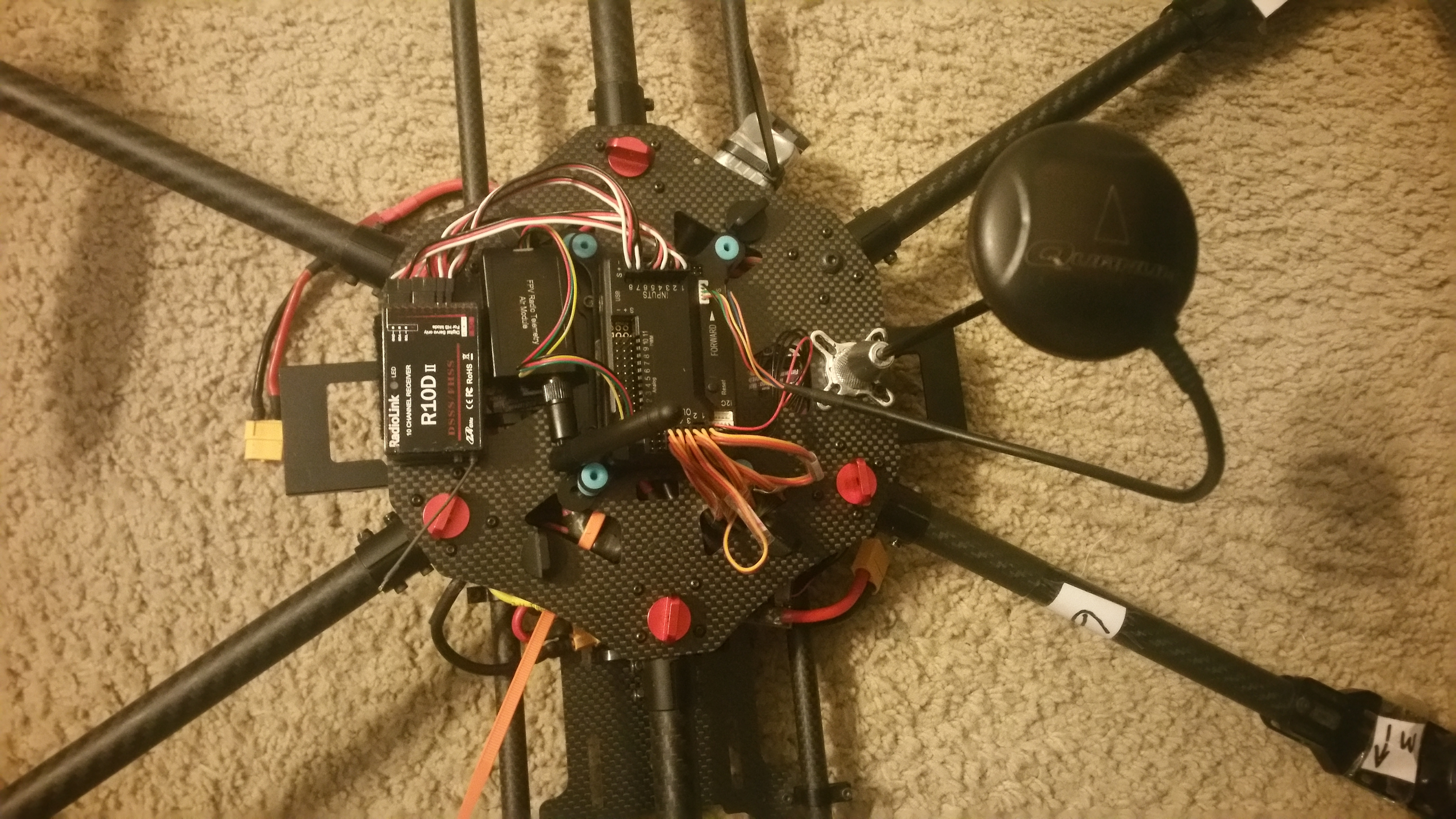
quanum gps /compass.
battery is mounted bottom center of drone pointing north
For parameters I chose external compass, obtain declination automatically, automatically learn offsets, externally mounted, ROLL 180,
I did auto trim.
FYI it flies better in stabilize but is uncontrollable and unpredictible in loiter and altitude hold.
On this frame, the external compass /GPS doesn’t seem to be aligned with the flight controller?
Frame vibrations are your enemy. How did you isolate the frame controller?
Instead of using parallel outputs from your receiver use a single serial link from the receiver to the flight controller.
it looks like you kept all the red wires from the ESC!? Remove all of them except one.
cables floating without cable ties is a recipe for disaster.
Many other little things, but this should make your aircraft happy.
Perhaps contact me privately as many other issues here aren’t of general interest.
Where are you located?
I have exactly the same problem using APM arducopter.
I have calibrated everything but compass calibration finishes very quickly using mission planner.
The quadcopter is very unstable in stabilize mode almost impossible to lift it and control.
When I tried Alt hold it fliped and fell upside down.
When tried loiter it started going high.
Did you solve the problem only by calibrating the compass using APM Planner 2?