I have recently installed pixhawk 2.1 in a quad that had the original pixhawk. I was having a vibration problem which is basically sorted with the help of Philip Rowse ProfiCNC. There is still and a problem with the motors pulsing particularly noticeable at speed. The Quad was flying well with 3.3.3 and cant figure out the problem.
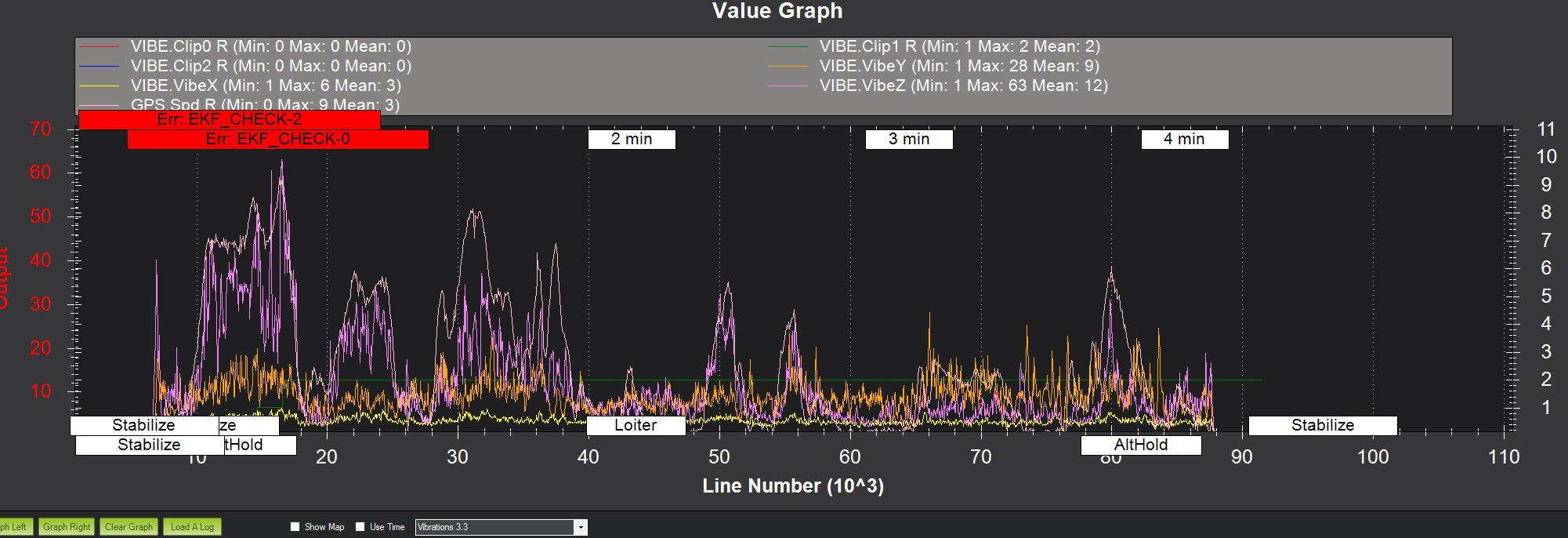
Your Z vibes (and a little Y) grow significantly when in forward flight. I plot GPS speed over the vibe traces to see the correlation. That would explain the pulsing at speed. The altitude controller is upset by the Z shake. You may not hear the pulsing if you run around in stabilize, but the log will still show the vibes. It may be a consequence of the quad’s frame. This is not the classic unbalanced prop vibe. It’s asymmetrical lift that the prop makes or beats in forward flight. Tough to resolve on some frames.
I can here the pulsing at speed especially the other day when at about 50kph it stuck the nose down then recovered very quickly. Why didn’t this problem show up when I had the original pixhawk in the same frame. Can you make any suggestions how I could resolve this problem.
Must be a difference in firmware or flight controller mount. What is your prop diameter? If large enough, we could look at accel filter, and rate filters.
Does anyone know what the natural frequency of the isolation is in the cube? That is a variable here.