Hi, I have a question regarding the swarming function of Mission Planner. I have tested it and it works to some extent, but with some pretty significant issues. Issue 1: There is an approx. 3 second lag between the leader drone and the slave drone. Issue 2: The slave drone follows the leader drone as it should and within the set relative position, but rotates randomly about the yaw axis since the activation of the swarming. After disabling the swarming function, the drone behaves normally. Does anybody know what could be the problem and how I could solve these issues ? Or can someone please tell me who to contact regarding these issues ? In the SITL simulations, the drones behave as they should. Thanks a lot for help.
Hello,
What telemetry link are you using?
Have you optimized the transmission rate and messaging?
Please provide a log of the slave so we can check what cause the yaw oscillation
Hi, sorry for the late reply. We are using RFD868x telemetry modules with P2P configuration. How could we optimize the transmission rate and messaging ? And per the logs, we currently do not have access to the logs so we will send them ASAP.
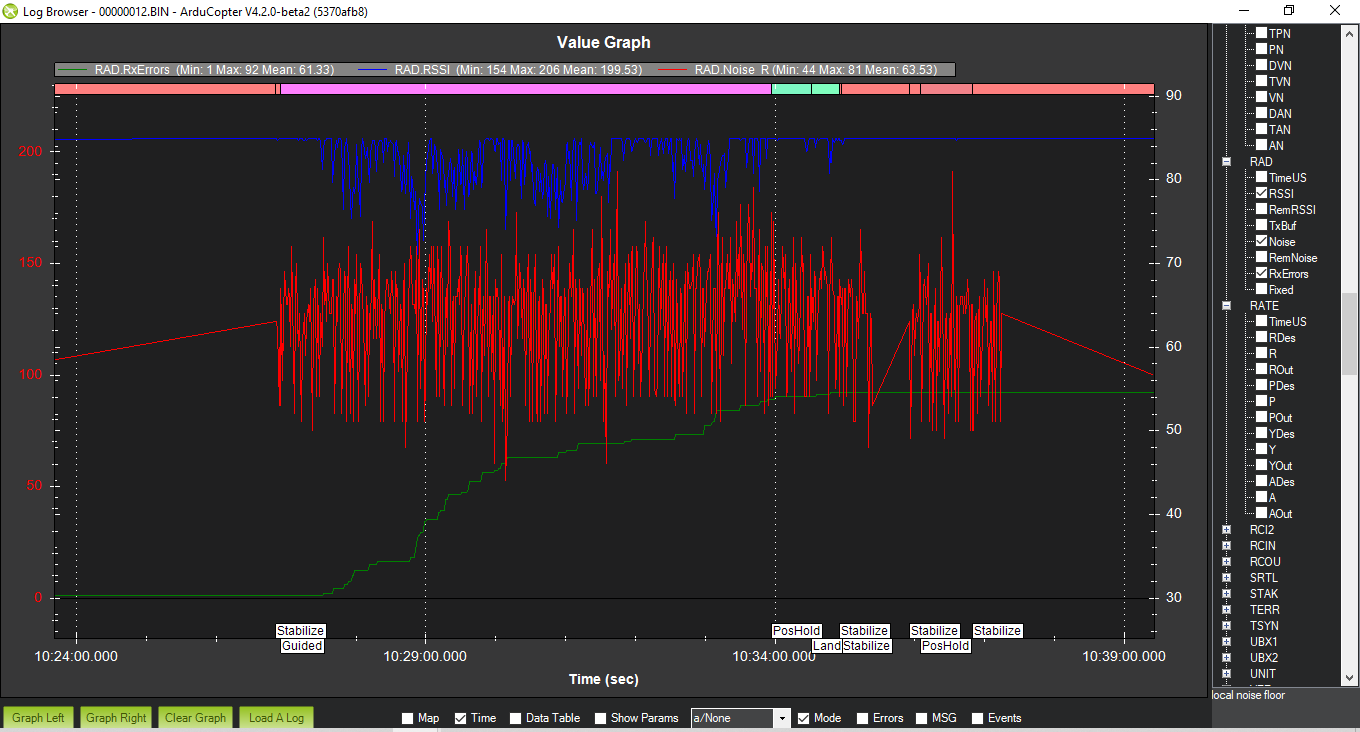
Hi, I am sending a log from one of the slave drones, from one of our swarm flights. The swarm was created by the swarming function of mission planner.
https://drive.google.com/drive/folders/1MwqjksAw7sWtdb2gHHixdXWX9Jx1E9XB?usp=sharing
Hello,
I would suggest you update to latest stable release and check if the vehicle YAW behave normally when you fly in guided mode. You can try to set bit 2 in GUID_OPTIONS to ignore yaw
From the log I see that you have lot of error on the transmission link, maybe you can relocate antennas and use higher gain at the base station
Thank you very much for the analysis and your observations. We will try to upgrade pixhawks and do the suggested settings.
We are currently trying to use RFD modules on 3 drones, 1 master and 2x slaves. The use of three modules at the same time causes mutual interference, and the only way so far was to use two modules at reduced power, but it is not an effective solution. Could we ask about your opinion, how would you manage a swarm of at least 3 UAVs with a stable connection between the ground station and the UAV?
We chose RFD modules due to industrial use and long range, which is good for the use of one UAV, but probably not for more. We also tried to alter the frequency spacing and to increase the refresh rate of the telemetry data but unfortunately there was no improvement.
Have you looked at my blogs on the subject?
3rd blog is on multicast
Hello,
Thank you very much for all provided information, we will look into your blog and try to research more concerning this topic.
I know this is a bit of an old post, but I have seen the same behaviour when swarming( copter 4.3, MP 1.3.80). This happens on hardware as well as in SITL.I have had a dig around inside the MP source and it seems to be a bug in the swarming code(see Oscillating yaw in copter swarm · Issue #3137 · ArduPilot/MissionPlanner · GitHub). Iv’e included a potential fix in that issue( only 2 lines of code).
I think the followers heading is set twice, the first time is in the setPositionTargetGlobalInt, the second time is as a MAV_CMD.CONDITION_YAW. Interestingly, the first command( setPositionTargetGlobalInt) has the yaw bitmask disabled, meaning that it shouldn’t be changing the copters heading, which I assume is why the second MAV_CMD.CONDITION_YAW is used.
I’d be interested to see what someone with more experience in the source makes of this.
Hope this helps