So I’m currently working on different techniques and controllers to integrate with the existing controllers in arducopter and I came across the existing simulink model in the repo. As a start I want to give it a command to takeoff to 10m and hover then study the controller, however I’ve spent the last 3 days and haven’t gotten there yet. Any help?
Welcome to Ardupilot!
For your issue, you’ll have to be more specific. Help with what? What is the issue you are encountering?
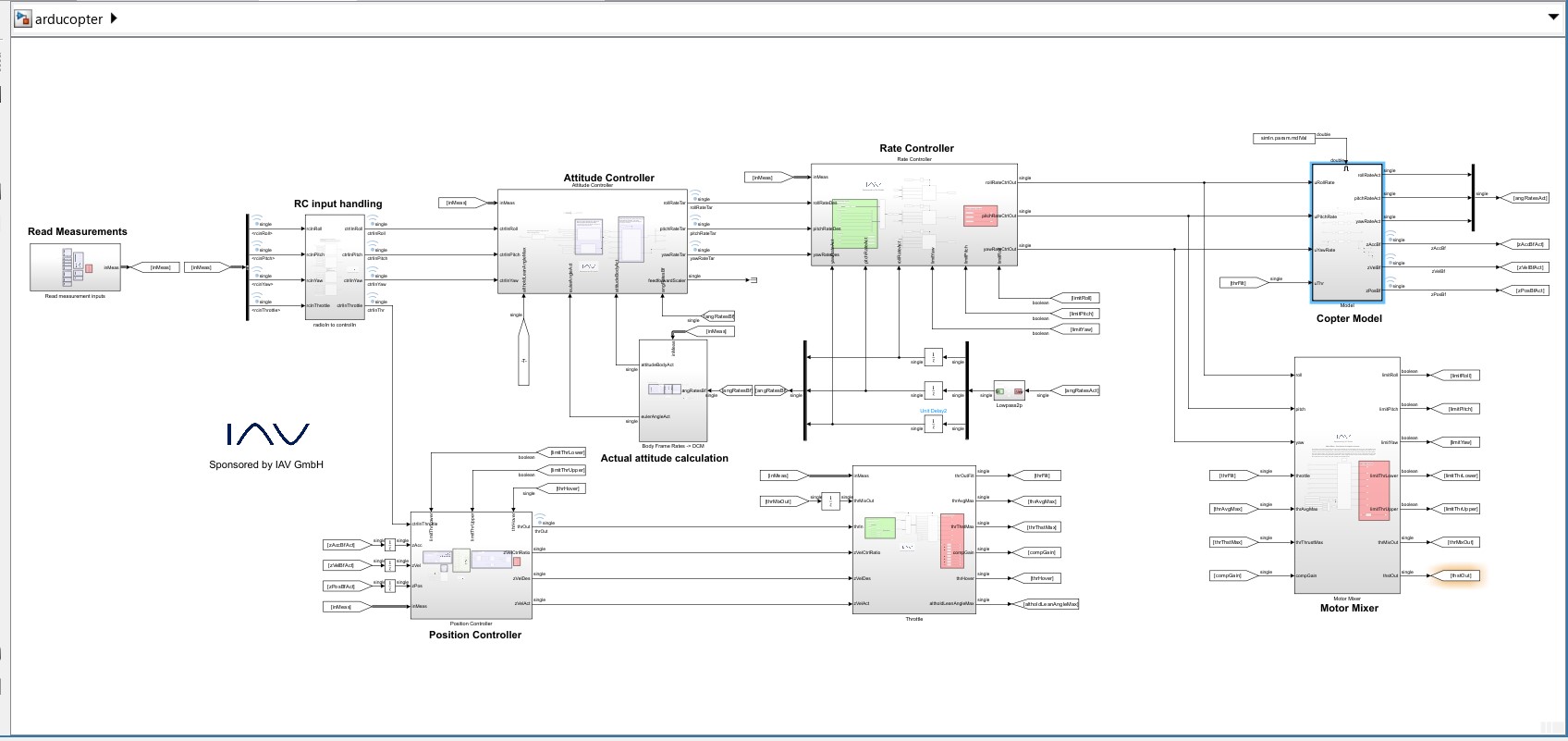
IIRC, the purpose of that Simulink is to load flight state measurements from an actual flight log, run the Ardupilot controller and see how a custom copter model reacts to the controller outputs. This is basically to perform a System Identification (SysId) of the real drone and try to get the copter model to react the same way the real drone reacted.
By changing how the Simulink obtains the flight state measurements (loop back the copter model outputs to the input of the controller instead of loading measurements from a flight log), you should be able to achieve your goal.
1 Like
Hi,
Where can I find this simılink model?
You can find it in the repo here ardupilot/Tools/simulink/arducopter at master · ArduPilot/ardupilot · GitHub
Thank you so much for taking the time, sorry for not seeing the reply earlier. However, thankfully I reached the same conclusion myself ![]()