Hello for all member,
I am new in this domain, and i have an urgent problem
I use arducopter with L298 motor drive module
Unfortunately i cant generate PWM signal to control motors of my rover
any help
thank you.
Hello for all member,
I am new in this domain, and i have an urgent problem
I use arducopter with L298 motor drive module
Unfortunately i cant generate PWM signal to control motors of my rover
any help
thank you.
Both arducopter and ardurover have no problem generating PWM signals (1100us to 1900us).
So you need the explain you problem better so that we can help you.
Why exactly can’t you generate PWM signals ? Why are you using arducopter firmware on a rover ? If not, please correct the tittle of your post.
Many thank for your response,
i have an arducopter with GPS-Compass Module
about driver i dont have pixhawk or other module which exists in wiki but i have an L298 motor driver module arduino
i ask if i can use this module to generate pwm for drive two motor and one servo for my own-designed rover
Regards,
You said
“Both arducopter and ardurover have no problem generating PWM signals (1100us to 1900us).”
How can i obtain these pwm signal
many thanks,
Which hardware are you using to run the ardurover code on? A L298 is an H-Bridge and it needs a PWM signal for speed control and an additional two bit digital input for direction, brake, freewheel control. As far as I know H-Bridge control is not yet implemented in ardurover.
I think brake support has been added to ardurover master, and some kind of brushless support is also there (probably using an H-bridge)
But again, I’m confused with the hardware, are you running it on an APM 2.8, or a pixhawk, or a pixracer, or a dropix … ?
And if it is a rover, why are you using arducopter firmware ???
Hi,
I only need to generate pwm signal from APM2.5 module,
thank you very much for your response
Now we are getting somewhere …
So you are using an ardupilot mega hardware board version 2.5
And have installed an old Ardurover firwmware on it, right ? Which version ?
All firmware versions, even older ones, do generate correct servo PWM signals, but those are a bit different from the PWM signals you need for the L298.
As far as I know only Ardurover firmware 3.2.0 has support for brushed PWM (the kind that you need)
But Ardurover firmware 3.2.0 does not support APM 2.5 hardware.
You will need to update your hardware … or use an extra arduino board to convert “servo PWM” into “brushed PWM for L298”.
Thank you for your response
the problem is i can not tuning pwm generated by APM2.5, the signal viewed on PIN1 (output) of APM2.5, for example, is very poor (0.96 Volt) and with this value of voltage i can not drive a motor
in addition, this value can not be modified from Mission Planner - i dont have an idea on how to do this-
Yes, you can not drive a motor directly from the APM2.5 PWM output.
That is why you need a motor driver. In your case the L2898 chip.
How did you measure the 0.96 Volt ?
It is supposed to output an aprox. 5V peak, but you can only measure that with an oscilloscope.
Depending on the multimeter, you can measure a voltage on a pwm output. I have one that is “slow” enough to do it and I get 0-5V on RC PWM outputs.
Have you any figure that describe solution, please
As far as I know only Ardurover firmware 3.2.0 has support for brushed PWM (the kind that you need)
Hello, I’m going to build skid streering ardurover with PXFmini hardware and I’m also going to use that L298 bridge.
Can you please point me, how to use ArduRover 3.2+hardware with that bridge?
Formerly I was thinking about PXFmini (or pixhawk) PWM Arduino signal convertor for that bridge, but it would be nice to be able to skip this convertor…
Thank you!
BTW, I’m going to have 2 similar bridges, not sure which one I’ll use, yet:
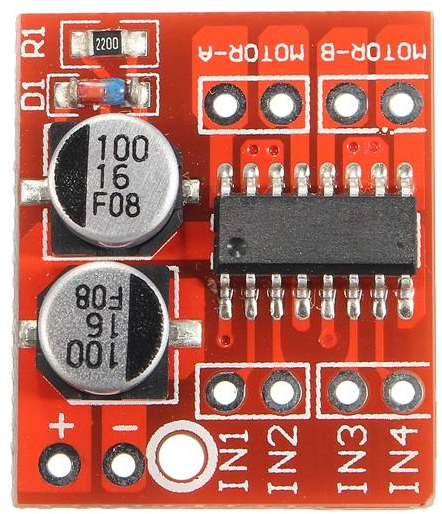
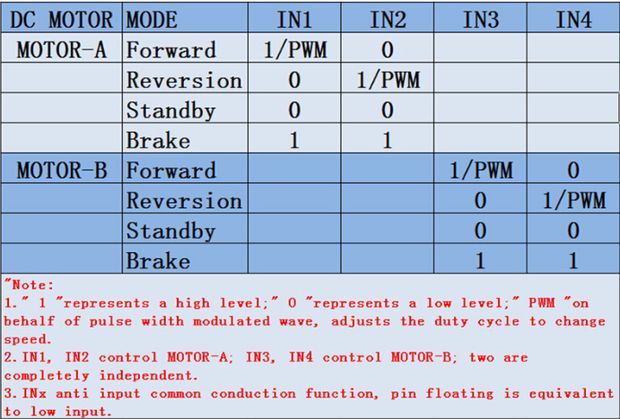
First one uses PWM IN for speed control and pins IN1, IN2 for mode control by setting them to HIGH/LOW combination (Forward, Reverse, …) - in other words 3 input signal pins for each motor (PWM, IN1, IN2)
Hello I want to use 298n motor driver and pixhawk, but I could not find how to make the connection. Can you help me?
Hello all, a newbie here!
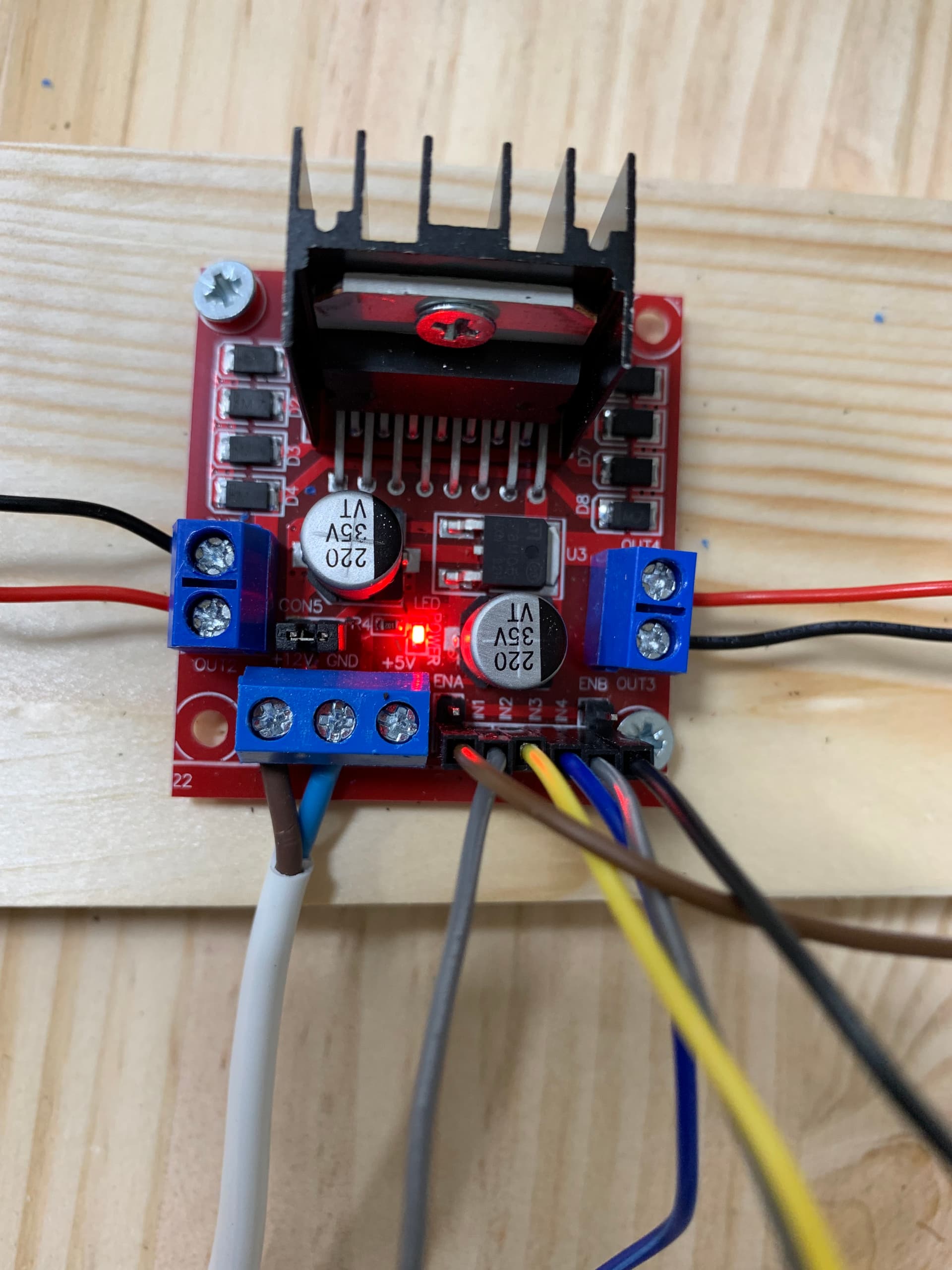
I’ve followed the instructions detailed here Ardupilot Rover L298N to set up a Rover with 2 DC 12v brushed motors and no luck, anybody achieved a similar build?
Im using a pixhawk 2.4.8 with Ardurover 4.2.3 firmware, here you are also some wiring photos according to specifications. When I try the motors nothing happens
I’ll appreciate any clue, log or similar to continue investigating the issue or any tip to address the problem.
Thank you in advance.