Hello guys
I have a hexacopter and I am interested in testing a different configuration.
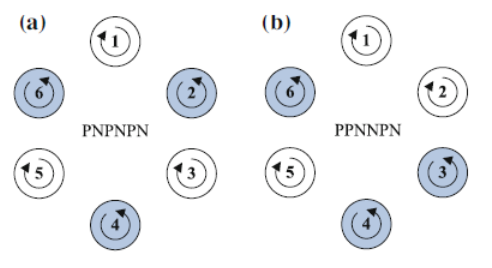
As proposed by Quan Quan in his book (Introduction to Multicopter Design and Control), using the PPNNPN configuration (b in the figure below), in case of failure of motors 1,2,3 or 4 the resulting configuration is able to remain controllable. I would like to test it.
I have took a look in the arducopter code and I think I need to change the AP_MotorMatrix.cpp file. As far as I understood, I must change the motor’s propeller CW and CCW direction.
Does anyone knows if I must change anything else?
Or has some opinion about this PPNNPN configuration?
Thanks in advance,