the geofence breach and fence breach mechanism does not work properly and keep showing random outputs of breach even when the copter is inside geofence and if the copter is outside the fence there is no warning of breach sometimes . could not find the cause of this issue any help is appreciated.
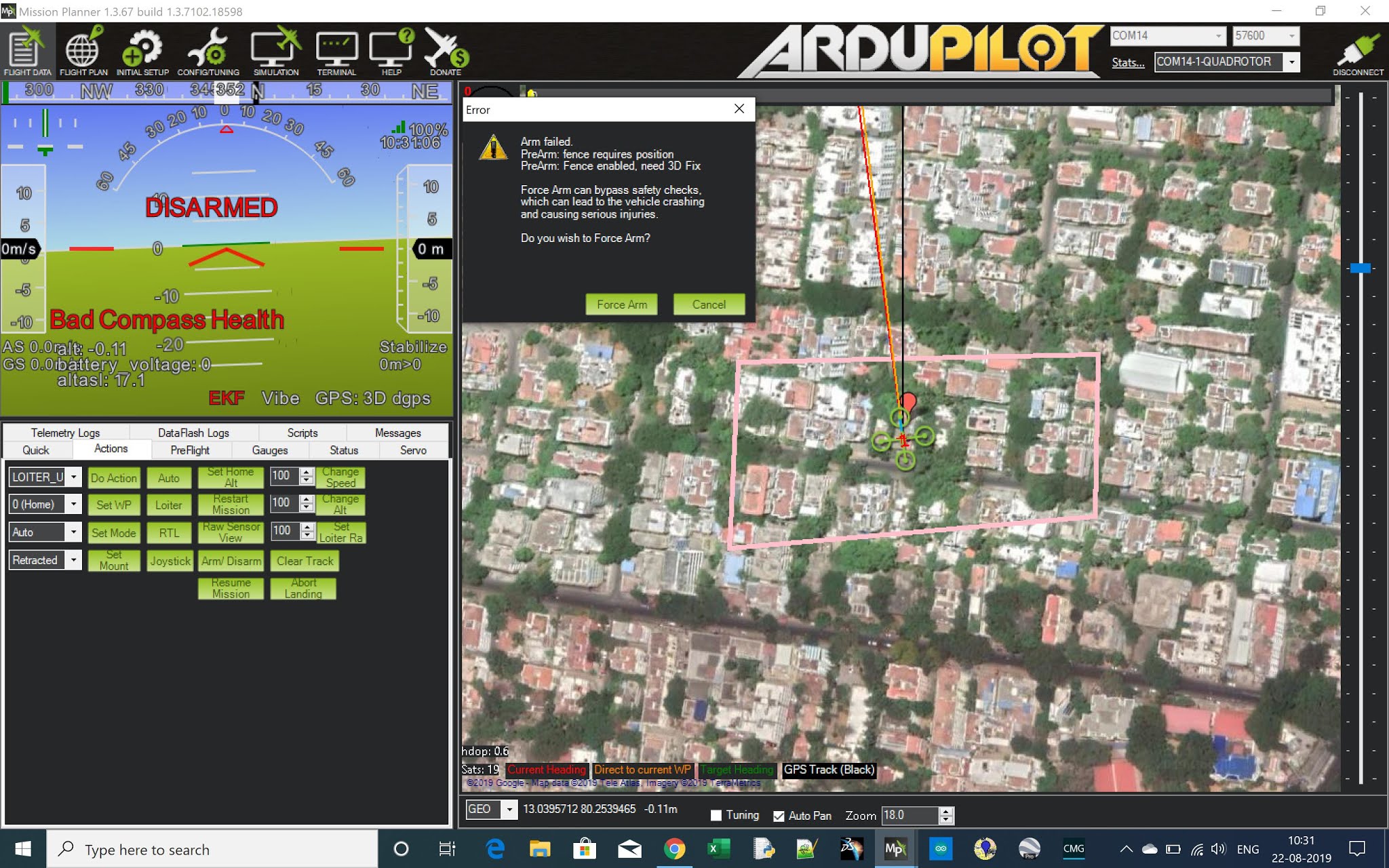
From your image, you don’t have a useable gps fix.
i have more than 15 satelites and thus it shows 3D dgps . the same problem existed when i had 3d Fix
3D fix doesn’t mean the fix is good enough for the ekf to set an origin.
Post a log.
thank you for the input and i was able to arm ardupilot properly but the process that went down is as follow:-
1)connect drone and create a geofence outside of current gps location
2)results in geofence breach when trying to arm
next attempt:
3)create geofence where the current gps location is inside
4) results again in geofence breach when trying to arm
- now i repower the ardupilot and reconnect and i should wait for sometime for the previous geofence breach message to go and then only the copter could be armed.
is this a necessity to reconnect the ardupilot everytime a new geofence is added and wait sometime to the firmware to recognise and calculate it properly.
Trying to arm outside an active geofence will of course generate an error. Also when you change the fence, you need to reload it.
Set logging whilst disarmed, replicate your issue, and post the log.
i have attached the log for reference and this log is generated as per the process i ve mentioned above Flight_Log.zip (591.7 KB)