I’m implementing follow me drone. Condition Yaw working fine, but negative X velocity from NED FRAME giving yaw added and therefore giving circular movement on jetson nano gazebo simulation. But on Intel CPU it’s working fine. I check dronekit and pymavlink library version is same.
from __future__ import with_statement
from __future__ import division
from __future__ import absolute_import
from os import sys, path
from io import open
sys.path.append(path.dirname(path.dirname(path.abspath(__file__))))
#-- Dependencies for video processing
import time
import math
import argparse
import cv2
import numpy as np
from imutils.video import FPS
#-- Dependencies for commanding the drone
from dronekit import connect, VehicleMode
from pymavlink import mavutil
#-- Function to control velocity of the drone
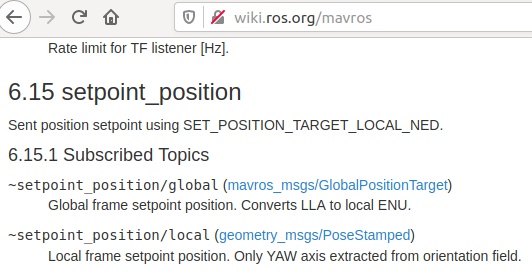
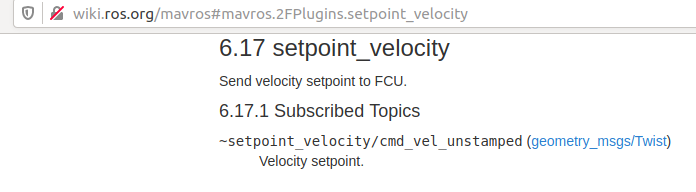
def send_local_ned_velocity(x, y, z):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0, 0, 0,
mavutil.mavlink.MAV_FRAME_BODY_OFFSET_NED,
0b0000111111000111,
0, 0, 0,
x, y, z,
0, 0, 0,
0, 0)
vehicle.send_mavlink(msg)
vehicle.flush()
def condition_yaw(heading):
msg = vehicle.message_factory.command_long_encode(
0, 0, # target_system, target_component
mavutil.mavlink.MAV_CMD_CONDITION_YAW, #command
0, #confirmation
1, # param 1, yaw in degrees
0, # param 2, yaw speed deg/s
heading, # param 3, direction -1 ccw, 1 cw
1, # param 4, relative offset 1, absolute angle 0
0, 0, 0) # param 5 ~ 7 not used
# send command to vehicle
vehicle.send_mavlink(msg)
vehicle.flush()
#-- Connect to the drone
vehicle = connect('udp:127.0.0.1:14550', wait_ready=True)
cap = cv2.VideoCapture(0)
width=cap.get(cv2.CAP_PROP_FRAME_WIDTH)
height=cap.get(cv2.CAP_PROP_FRAME_HEIGHT)
tracker = cv2.legacy.TrackerMOSSE_create()
Hide quoted text
def drawBox(img, box, distance):
x, y, w, h = int(box[0]), int(box[1]), int(box[2]), int(box[3])
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 255), 2, cv2.LINE_AA)
cv2.putText(img, "Estimated distance: {}cm".format(int(distance)), (75, 75), cv2.FONT_HERSHEY_SIMPLEX, 0.7,
(255, 0, 255), 2)
cv2.line(img, (int(width/2), int(height/2)), (int(x+w/2), int((y+h/2))), (255,255,255), 1)
while True:
_, img = cap.read()
# Convert BGR to HSV
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# define range of blue color in HSV
lower_blue = np.array([100,50,50])
upper_blue = np.array([130,255,255])
# Threshold the HSV image to get only blue colors
mask = cv2.inRange (hsv, lower_blue, upper_blue)
contours = cv2.findContours(mask.copy(),
cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[-2]
if len(contours)>0:
contour = max(contours, key=cv2.contourArea)
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(img,(x,y),(x+w, y+h),(0,255,0),2)
#-- Initialize the tracker
tracker.init(img, (x, y, w, h))
distance = int(474 * (80 / w)) if w != 0 else 0
#print(distance)
#-- Draw the bounding box and estimated distance
drawBox(img, [x, y, w, h], distance)
errorx = abs((x + w/2)- width)
errory = abs((y + h/2) - height)
print(distance, errorx, errory)
if distance > 120:
send_local_ned_velocity(1, 0, 0)
if distance < 100:
send_local_ned_velocity(-1, 0, 0)
#if int(errorx > 700):
#condition_yaw(1)
#if int(errorx < 500):
#condition_yaw(-1)
#if int(errory > 200):
# send_local_ned_velocity(0, 0, -1)
#if int(errory < 100):
# send_local_ned_velocity(0, 0, 1)
#-- Write video frame and display
cv2.imshow('Image', img)
k = cv2.waitKey(5)
if k == 27:
break
cap.release()
cv2.destroyAllWindows()