I am having problems with my drone crashing into the ground and then bounce back up again continuously while it should just stay stationary in the air. I think it is because the drone responds to late to channel overrides making it crash into the ground then receive a throttle up channel override and then when it is to high receive a throttle down channel override. This behavior in a loop is the bouncing I am seeing. I have some more info and graphs in this github issue dronekit/dronekit-python#1141.
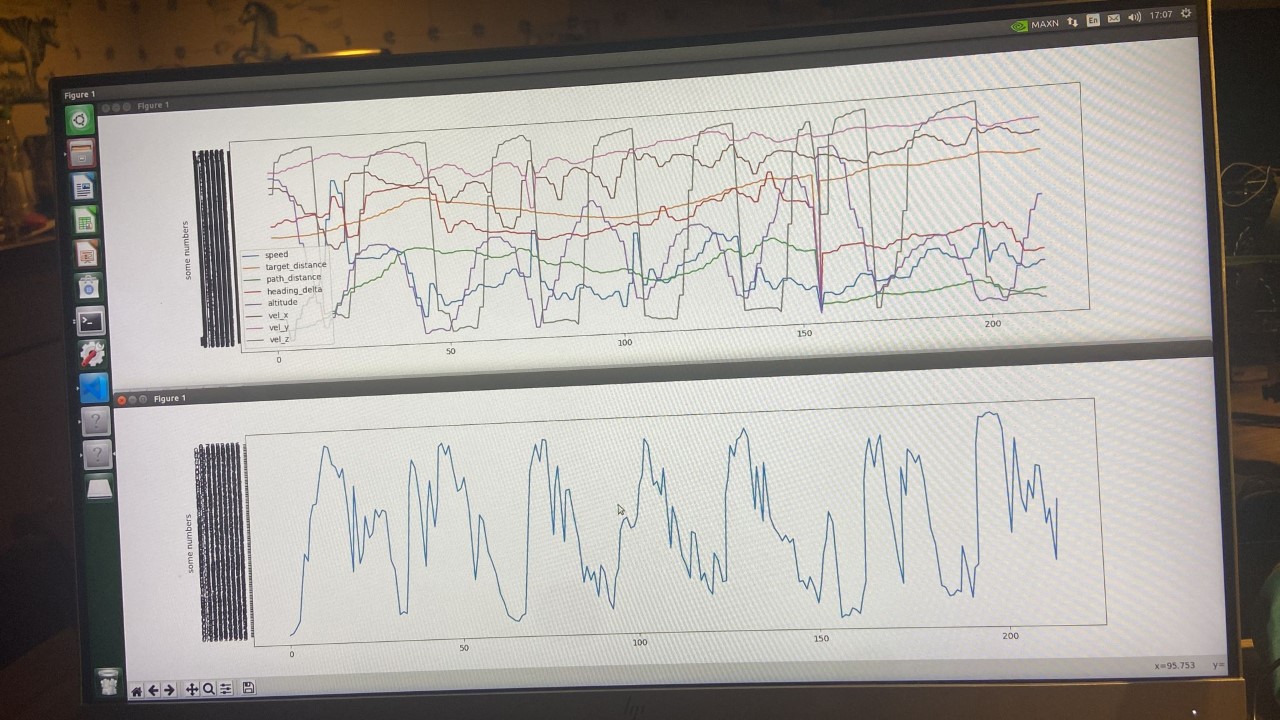
Top graph: Flight information at 6hz
Below Graph: written channel override at 6hz
Hope someone can help
Thanks