We recently had a custom quad running ArduCopter 3.6.9 crash. We looked at the logs, but aren’t entirely convinced of what happened. Would anyone be able to shed light on this?
Copter is a FoxTech Hover 1 with a RadioLink Pixhawk. We are flying custom batteries (6S3P Li-Ion), with a 800 g payload.
The aircraft was flying at approximately 5 m/s westward along a west facing slope in an auto mission, leg starting approximately 5-7 m above the top of the slope. There is a small ridge running north where the drone crashed. The gully formed between the ridge where the drone crashed and the west facing slope slopes to the north. Aircraft was found on the north facing slope of the ridge.
The aircraft was found with the front right motor (No 1 motor) completely detached from the airframe. The motor bolts to a square arm with two bolts from the underside that also mount the landing leg. Neither the landing leg nor motor bolts were recovered. The distal bolt hole does not show evidence of thread damage, however, the proximal bolt hole has thread damage on the first two to three threads. The motor cables are routed through the arm, which is a CF square tube with aluminum tubing at the front and end of the arms where bolts run through. The motor cables were damaged where they entered the CF tube, with insulation cut all the way to the conductors in multiple locations.
The propeller on the front right motor has only a couple nicks on the leading edge, however one of the props has about 5 cm of trailing edge missing. These are the FoxTech folding props original to the aircraft.
The crash occurs at approximately 940 seconds from boot. I’ve linked the dataflash log here: https://drive.google.com/file/d/1km1yyDAKOPVNzV0rKOU47SRQNw134nM3/view?usp=sharing.
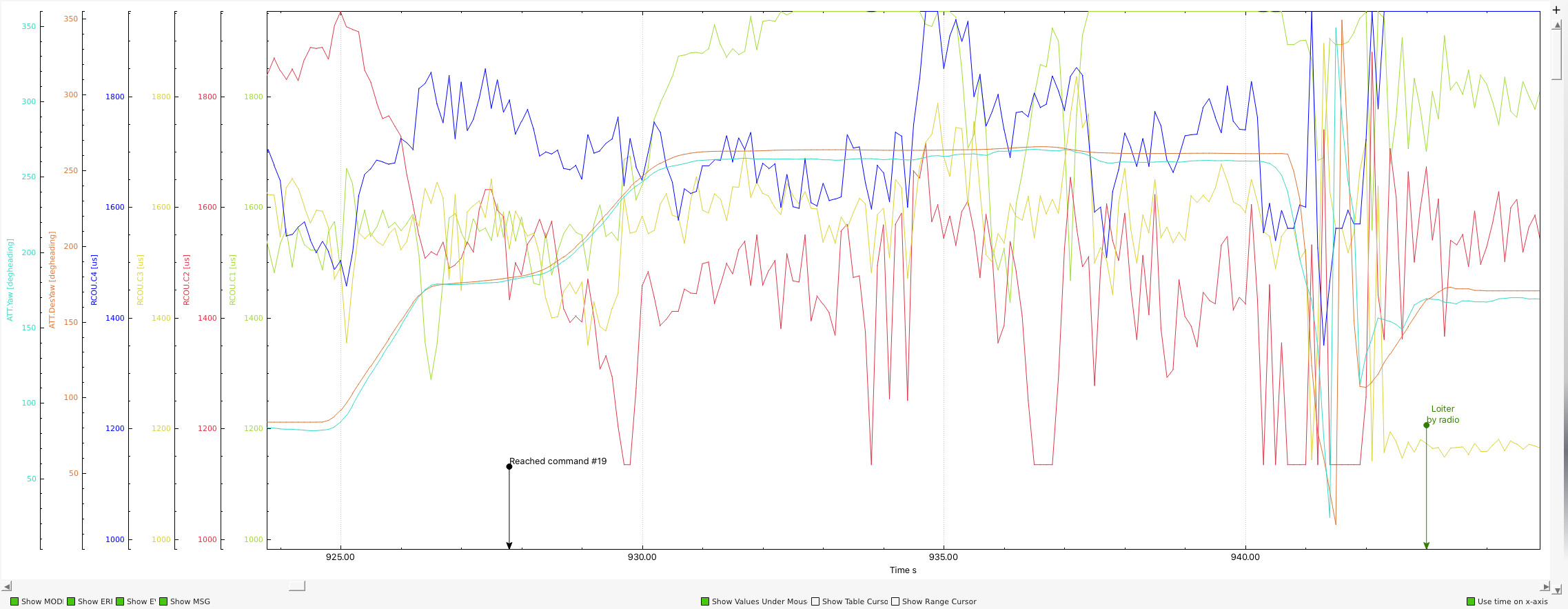
A quick summary of what we noticed in the log - the No 1 motor is pegged to 100% throttle near the start of the leg (927 s from boot). This is confirmed with power draw increasing at the same time from 200 W to 400 W, which is what we would expect for a motor going all out. The aircraft hits a patch of turbulence at 937 s, but recovers to what appears to be stable flight. At 940 s, the controller begins to spin down the No 2 motor, reaching idle by 940.5 s. At this point, we see the yaw of the aircraft begin to diverge from its setpoint, yawing left. At 940.55 s, there is a jump in x and z axis acceleration, with z axis acceleration reaching +0.5 G, and x axis acceleration reaching +0.5 G. We see the controller begin to spin down the No 1 motor as well at 940.6 s, and the roll and pitch begin to diverge from their setpoints. Immediately after this, power draw increases to 600 W by 940.7 s The copter rolls right beyond 30 degrees at 940.8 s. Ground impact is recorded at 942 s.
Our current suspicion is that the No 1 motor somehow detatched from the aircraft, presumably at 940.55 s. This is primarily because we did not recover the leg and motor bolts, and there is no evidence that the motor bolts sheared off while still threaded. However, we don’t have a good explanation for what caused the motor to detach, given that the copter was otherwise flying, and survived some turbulence, and then recovered for at least one second. One possibility that we don’t have the background knowledge to determine is whether or not the attitude estimation is accurate - we know that this aircraft has had vibration issues, but we assumed that they weren’t enough to affect the stability of the aircraft.
I’ve also attached a PDF of a Jupyter Notebook with our analysis so far.ArduCopter Crash Analyzer.pdf (329.6 KB)